
[TOC]
## pv 操作
"**PV操作**" 是操作系统中的一个经典术语,特别用于 **并发控制和进程同步**,最早由计算机科学家 **Edsger Dijkstra** 提出。
code
```
// 生产者:
P(S); // 等待资源
// 生产数据;
V(S); // 释放资源
// 消费者:
P(S); // 等待资源
//消费数据;
V(S); // 释放资源
```
## 进程
**三状态模型**
```
+-------+ +-------+XAD DF
| 运行 |----->| 就绪 |
+-------+<-----| |
| +-------+
|
V
+-------+
| 阻塞 |
+-------+
|
V
+-------+
| 就绪 |
+-------+
```
> 阻塞态为当一个**进程请求的资源暂时不可用**(如等待I/O完成、等待消息、等待信号量),它就会从运行态或就绪态转换为**阻塞态**
**PCB**
- 进程通常由程序、数据集合、进程控制块PCB组成。
- PCB是种数据结构,是进程存在的唯一标识
**PCB管理方式**
- **线性方式** 把所有PCB組織在一張線性表中,每次查找是需要掃描全表。
- **链接方式** 把具有同一狀態的 PCB,用其中的鏈接字鏈接成一個隊列,PCB存儲在一個連續的區域。
- **索引方式** 同一狀態的進程歸入一個索引表,多個狀態對應多個不同的索引表。
## 前驱图
前驱图是一个有向无循环图,由节点和有向边组成,节点代表各程序段的操作,而节点间的有向边表示两个程序段操作之间存在的前趋关系。用于这种图可以描述多个程序或进程之间的执行顺序关系。
## 内存
**地址重定位**
地址重定位是指将程序中的地址虚拟地址(逻辑地址)变换成内存的真实地址(物理地址)的过程。
- 逻辑地址
相对地址。CPU所生成的地址。逻辑地址是内部和编程使用的、并地址不唯一。
- 物理地址
绝对地址。加载到内存地址寄存器中的地址,内存单元的真正地址。
**静态重定位**
绝对地址=相对地址+程序存放的内存起始地址
特点
- 程序运行前就确定映射关系
- 程序装入后不能移动
- 程序占用连续的内存空间
**动态重定位**
对地址=重定位寄存器的值(B)+逻辑地址寄存器的值(VR)
特点
- 程序占用的内存空间可动态变化
- 程序不要求连续的内存空间
- 便于多个进程共享代码
### 分区存储管理
把主存的用户区划分成若干个区域,每个区域分配给一个用户作业使用,并限定它们只能在自己的区域中运行。分为,可重定位分区,可变分区,固定分区
**固定分区**
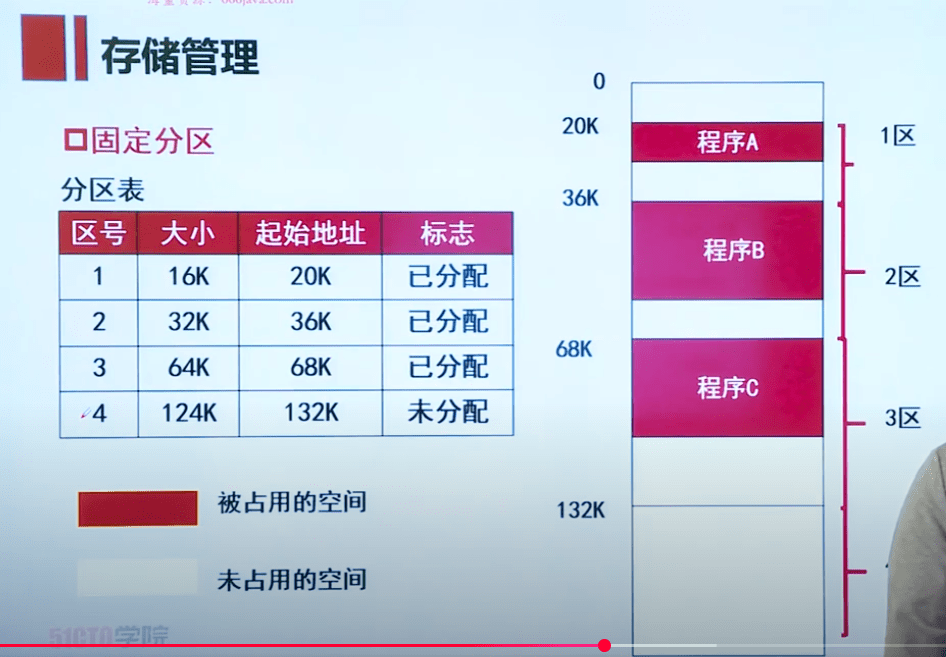
**可变分区**
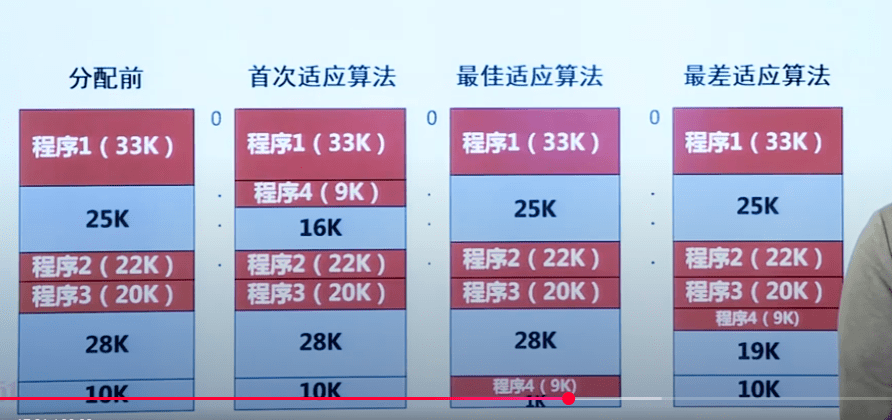
**可重定位分区(最常用)**
跟磁盘整理一样,把已使用的分区都放到一块
### 分页存储管理
将一个进程的地址空间划分成若干个大小相等的区,称为页。相应地,将主存空间划分成与页相同大小的若干个物理块,称为块或页框
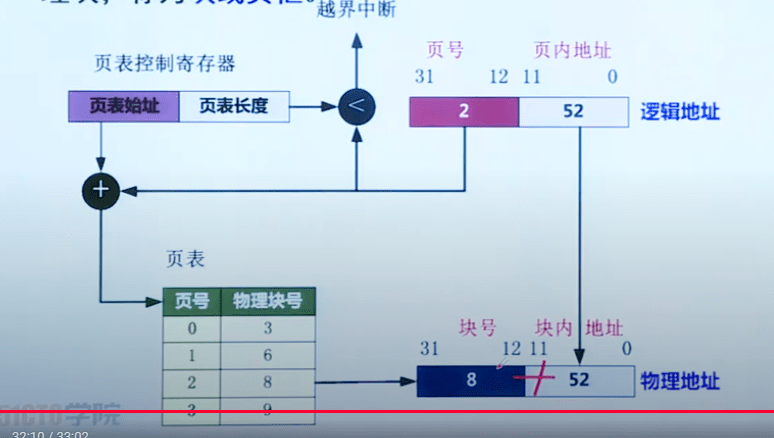
> 页表控制器:将进程中的**虚拟页号(Virtual Page Number, VPN)**映射为**物理页号(Physical Page Number, PPN)**
逻辑地址=页号+页内地址
物理地址=块号+块内地址
<br/>
如果一个系统的分页大小为512直接,说明页内地址是512,9位地址,如果一个程序的逻辑地址为1111(十进制),转二进制为10001010111,是11位,也就是后9位是页内的hi在,前两个是10是页号,即逻辑页号位2
另一种简单换算是11111/512=2.169921875,即逻辑页号是2
<br/>
**问题1**
假设页和物理块的大小均为1024B.逻辑地址为2100,物理地址是什么
页表为
| 页号|物理块号|
|---|---|
|0|3|
|1|6|
|2|8|
|3|9|
页号=2100/1024=2
页内地址=2100%1024=52
物理地址=8×1024+52=8244
答为 8244
**问题2**
某计算机系统页面大小为4K,若进程的页面变换表如下所示,逻辑地址为十六进制1D16H。该地址经过变换后,其物理地址应为十六进制()。
| 页号|物理块号|
|---|---|
|0|1|
|1|3|
|2|4|
|3|6|
解答:4k=2^12,而1D16H16进制,后三位刚好是2^12,表示页内地址,第一位1为页号,映射为物理块的3,所以是 3D16H
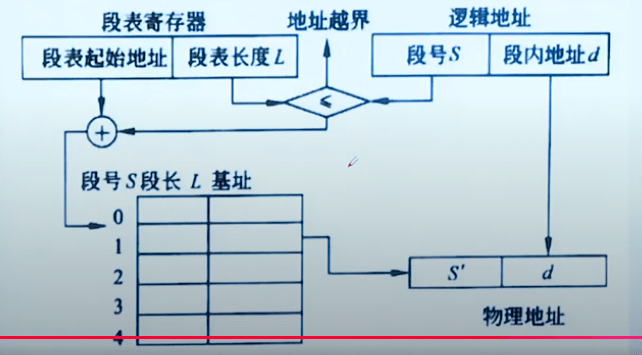
### 分段存储管理
分段式存储管理系统中,为每个段分配一个连续的分区,而进程中的各个段可以离散地分配到主存的不同分医中。在系统中为每个进程建立一张段映射表,简称为“段表”。每个段在表中占有一个表项,在其中记录了该段在主存中的起始地址(又称为“基址”)和段的长度。进程在执行时,通过查段表来找到每个段所对应的主存区
|段号|基地址|段长|
|---|---|---|
|0|1100|800|
|1|3310|50|
比如逻辑地址(0,790表示),0号段,段长为790,能放到段长800中,
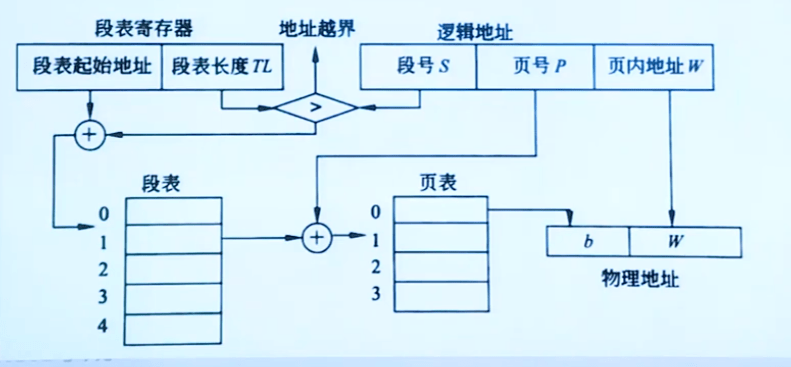
### 段页式存储管理
段页式系统的基本原理是先将整个主存划分成大小相等的存储块(页框),将用户程序按程序的逻辑关系分为若干个段,再将每个段划分成若干页,以页框为单位离散分配。在段页式系统中,其地址结构由段号、段内页号和页内地址三部分组成。
### 虚拟存储管理
在前面介绍的存储管理方案中,必须为每个作业分配足够的空间,以便装入全部信息。当主存空间不能满足作业要求时,作业无法装入主存执行。如果一个作业只部分装入主存便可开始启动运行,其余部分暂时留在磁盘上,在需要时再装入主存,这样可以有效地利用主存空间。从用户角度看,该系统所具有的主存容量将比实际主存容量大得多,人们把这样的存储器称为虚拟存储器。
## 设备管理
**程序控制**
- 无条件传送:/O端口总是准备好,cpu在需要时随时直接利用访问相应的/O端口。
- 程序查询: CPU必须不停地测试/O设备的状态端口。CPU与I/O设备是**串行工作**的。
**中断**
- 某个进程要启动某个设备时,CPU就向相应的设备控制器发出一条设备引/O启动指令,然后CPU又返回做原来的工作。CPU与I/O设备可以**并行工作**。
- 中断类型
| 类型 | 说明 | 示例 |
| --- | --- | --- |
| **外部中断(硬件中断)** | 由外部设备触发 | 键盘敲击、鼠标移动、网络包到达、硬盘数据到位 |
| **内部中断(异常)** | CPU 执行指令时发生错误或特殊状态 | 除零错误、非法指令、系统调用 |
| **软件中断** | 程序主动触发中断 | `int 0x80`(Linux 系统调用) |
**DMA(直接内存存取)**
- DMA(Direct Memory Access,直接内存访问)是一种让外设(如网卡、硬盘)可以绕过 CPU,直接访问内存的技术,用于提升数据传输效率、减少 CPU 开销
- 通过DMA控制器直接进行批量数据交换,除了在据传输开始和结束时,整个过程无须CPU的干预。
例子:
假设你要从硬盘读取 1GB 文件到内存:
**没有 DMA(传统方式)**:CPU 一边读硬盘,一边写内存,相当于你手动搬砖,CPU 非常累。
**有了 DMA**:你雇了个“苦力”(DMA 控制器)替你搬砖,CPU 只发出命令,剩下的传输由 DMA 完成,自己可以干别的。
## 文件存储管理
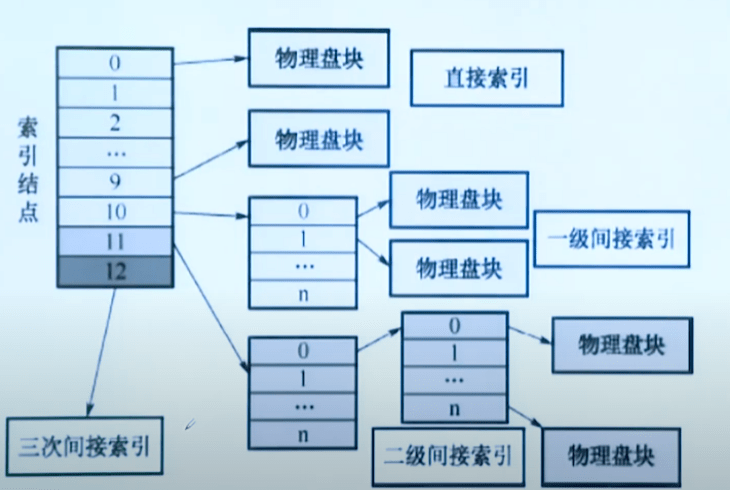
> 0-9 为直接索引,10为一级索引节点,11 为二级索引节点,12 为三级索引节点
> 11 节点,指向了n 个节点,n个节点又指向了n 个节点,索引 一共又n*n个节点
示例:
如果文件索引节点0-5为直接索引,6为一级索引,7 为二级索引,每个地址项为4字节,每个磁盘索引块和磁盘数据库大小均为4kB
求最大文件:
- 那么最大单文件是直接索引大小为`6×4KB=24KB`,加上一级`(4KB/4B*4KB=4096KB)`,三级`(4KB/4B*4KB/4B*1024=4194304KB)`,总大小为4198424,
- **难点**为,每项是4B,磁盘索引块为4KB,那么可以存放1024 个地址,每个地址可指向4KB,所以,一级为(1024*4KB),二级为1024*1024*4KB
求每个范围的逻辑块号范围
- 直接索引块号为0-5,一级索引逻辑块号我为6到6到(6+1024)即6-1029,二级为1030及以上
- 目录
- Lua
- 常用接口
- 协同程序
- 文件IO
- 错误处理
- 面向对象
- Scheme / Racket
- 技巧
- 如何设计递归
- 导入自定义文件
- []与() 的区别
- 打印函数
- 函数实现设计诀窍
- trace 打印调试信息
- 命令
- racket 运行
- raco 打包
- 语法
- 向量 / 结构体 / cons / list / string?等检查类型
- 符号 / 字符 / 字符串
- if / and / cond 条件分支
- 类型判断 / 等式判断
- local 组织函数
- 测试函数
- Rust
- 命令
- rustup
- Cargo
- rustc
- Rustfmt
- C++
- 快速入门
- 技巧与概念
- pragma comment
- socket 编程
- 编译
- 引入库的 <> 与 "" 的区别
- 语法
- 基础类型
- 运算符表
- 运算符重载
- 命名空间
- const和mutable的使用
- c++1新特性
- nullptr / constexpr (c++ 1x)
- auto / decltype 类型推到 (c++ 1x)
- 循环数组 区间迭代
- if-switch-变量声明强化
- 面向对象
- 原始字符串字面量 R"
- 指针
- 内存泄漏
- 指针与引用的差别
- const修饰指针
- 智能指针
- 数组
- 对象
- 构造函数
- 虚继承/虚基类
- 虚函数和纯虚函数
- 抽象类
- 栈中实例化 / 堆实例化
- 实例类型转换
- 继承 公有 / 私有 / 保护
- 子类调用父类
- 多重继承
- 实例指针(this)
- 友元函数 访问类私有和保护的成员
- 构造函数、explicit、类合成
- 多态的应用
- new和delete的使用
- 函数
- 引用传值/指针传值
- inline函数
- Lambda 表达式
- 模版
- 函数模版
- 类模板
- 容器
- std::array
- std::vector
- std::ist / std::forward_list
- map 各种map
- 各种 set
- 元组
- 正则
- 并发
- thread
- 锁
- 异步访问
- 条件变量
- 原子操作
- 命令
- g++
- make
- vcpkg
- clang++
- pkg-config
- 常用实例
- fork 方式创建后台进程
- 第三方库
- folly 工具库
- QxOrm
- catch 测试框架
- MSYS2
- pacman
- c++ 性能追踪
- gperftools
- gprof
- Qt
- Qt 代码风格
- qt 项目框架
- Qt Design Studio
- 技巧
- 添加 .pri 项目
- 添加子项目
- 加载第三方库
- 中文不乱码
- 信号和槽
- 国际化
- 定制帮助系统
- 多媒体
- 数据验证器
- 伙伴快捷键
- 单词补全
- QPushButton 样式问题
- 为元素添加滚动条
- 指定图标
- 自定义的结构体支持串行化
- 界面数据存储与获取
- 匿名函数
- 预编译
- 升级浏览器内核
- 封装弹窗
- 命令
- qmake
- 命令行编译
- pro 文件
- CONFIG
- TEMPLATE
- windeployqt 打包
- jom
- 知识
- 元对象系统(MOC)
- 对象树与拥有权
- 各个 TextEdit 的区别
- Qt 资源系统
- QSS 查询
- QObject的创建时间
- qt 的继承关系
- 单元测试
- 宏
- 测试类/函数
- GUI测试
- Benchmark测试
- 实例
- 在子项目中创建
- 数据驱动测试程序'
- 模拟GUI事件
- API
- 控件
- QInputDialog
- QIcon
- QFileIconProvider 提供文件icon
- QActionGroup
- QSystemTrayIcon
- QMenu
- QWidget
- QLabel
- QTextBrowser
- QTextEdit
- QPushButton
- QRadioButton
- QDockWidget
- QMainWindow
- QKeySequence 预设快捷键
- QSplashScreen 启动图
- QListWidget
- QTreeWidget
- QTreeView
- QTreeWidgetItem
- QTreeWidgetItemIterator 遍历QTree
- QTableWidget
- QTableView 基类
- QTableWidgetItem
- 条目控件
- 条目的拖拽
- 自定义右键菜单
- 基于条目控件的样式表
- QWebEngineView
- 模型
- QFileSystemModel 文件系统
- QStandardItemModel
- QAbstractItemModel 基类
- QAbstractItemView / QStandardItem
- QSortFilterProxyModel
- 布局
- 布局分类
- QSplitter 分裂器
- QSizePolicy 伸展
- 伸展因子
- 伸展策略
- BoxLayout 布局
- FlowLayout 流式布局
- QGridLayout 栅格布局
- QFormLayout 表单布局
- 文件系统
- QFile
- QFileInfo
- QStorageInfo 分区信息
- QTemporaryDir
- QTemporaryFile
- QDir
- QFileSystemWatcher 监控文件
- QLockFile
- 字节与流
- QByteArray
- QDataStream
- QTextStream
- 进程
- QProcess
- 线程
- QMutex
- QReadWriteLock
- 并发方案
- 继承 QObject [推荐]
- 继承 QThread
- QRunnable与QThreadPool 配合
- QtConcurrent
- Application::postEvent
- 图像
- QPainter
- QPixmap / QBitmap
- QImage
- QPicture
- QImageWriter 创建图片
- QImageReader 读取图片信息
- 命令行工具
- QCommandLineParser
- 关联容器
- QStack
- QVector
- QLinkedList
- QQueue
- QList
- ====== 顺序容器 ======
- QMap
- QHash
- QMultiMap 一key 多value
- QMultiHash 一key多value
- QCache key映射到类
- QPair
- QSet
- ====== 关联容器 ======
- QVariant
- QVariantList
- QVariantMap
- QMetaObject 元对象,反射
- invokeMethod
- 实例
- 反射类名
- 反射实例
- 数据库
- mysql 链接
- sqlite 内存版
- QSqlDatabase 连数据库
- QSqlQuery
- QSqlTableModel 绑定表
- QSqlQueryModel
- 日志
- myMessageOutput 自定义日志格式
- 网络
- QLocalServer/QLocalSocket
- QTcpServer / QTcpSocket
- QNetworkAccessManager 异步API
- QSslSocket
- QUdpSocket
- QUrl
- QUrlQuery
- 系统
- QStandardPaths
- QDesktopServices 桌面服务
- QSysInfo
- 日期和时间
- QDate
- QDateTime
- QTime
- 异常处理
- QException
- 正则
- QRegExp
- 字符串
- QStringRef
- QUuid
- Core
- Q_PROPERTY 属性
- QGlobalStatic
- QSharedData
- QCoreApplication
- 全局 qxxx
- qSort / qStableSort 排序
- qRegisterMetaType 注册自定义类型
- qSetMessagePattern 改qDebug格式
- qInstallMessageHandler
- QCryptographicHash 加密
- QSettings
- QTimer
- QObject
- 设计模式
- 工厂类
- 单例模式
- 第三方库
- FluentUI UI框架
- Felgo 可做移动端
- Dart
- 语法
- 基础类型
- 运算符
- 函数
- 类
- 控制流程语句
- 异常
- 映射
- 异步支持
- Future / Stream
- async/await
- 容器
- Map
- List
- Set
- 库和可见性
- 测试
- pubspec.yaml
- Flutter
- 安装
- 插件
- 插件继承 implements
- 与原生通信
- 技巧
- 混合开发方案
- State Widget 生命周期
- 自动切换Andrio和Ios 主题
- 切换主页面缓存
- 跨平台 Plugin
- 同时调试flutter 和原生
- 命令
- flutter
- flutterfire 构建 Firebase
- fvm
- build_runner 代码生成
- melos 老dart 的 monorepo
- 常见组件
- 布局
- sliverList
- 响应式
- 交互
- cupertino IOS 风格
- 资源与图片
- Packages
- 路由
- Builder / FutureBuilder
- Stream
- theme
- RepaintBoundary 隔离重绘
- 三方库
- Getx 状态管理
- shared_preferences 存储
- webview_flutter
- FluroRouter 路由
- flutter_hooks 像 react hook
- hooks_riverpod 状态管理
- serverpod 服务端
- Pigeon 与平台原生通信
- amap 高德的地图
- flutter_launcher_icons 启动图标
- flutter_native_splash 启动页
- sqlite 数据库
- ====== UI库 ======
- macos_ui 实现mac ui
- fluent_ui winUI
- 实例
- 放大图片
- Python
- 技巧
- 语法
- 字符串
- 字典
- 装饰器
- 类
- 异常和错误
- 异步 python 3.x
- 场景
- 文件读取
- 内置包
- 包
- 工具类
- Supervisor-Linux/Unix进程管理工具
- 网络
- urllib包
- requests-比urllib2简洁
- BeautifulSoup-解析html
- 数据库/ORM
- pymysql -python3的mysql库
- SQLAlchemy ORM
- 办公
- pdfminer3k-解析pdf
- 测试 & 安全
- faker -测试
- web 框架
- web.py框架
- Django框架
- 模型
- gui
- easygui_gui模块
- tkinter - 高效简单
- pyqt5 - 控件丰富
- 单元测试
- doctest模块
- unittest模块
- 命令
- pip
- poetry 高级pip
- virtualenv 虚拟环境
- Java
- java 数组
- java 类
- java 包
- java 异常
- java String
- java 集合
- PHP
- 常用场景 / 封装
- appkey/secretKey 实例
- https双向认证
- 从字符串中找出高频词
- 操作 HTML DOM
- levenshtein 输出错误,猜测输入的值
- ip 查询
- 配置webhook.php
- php 输出图片
- ignore_user_abort 网页断开有效
- 原生支持异步的方法 exec
- 可自动结束的程序
- 循坏程序
- ===== 函数 / 类封装 ⬇ =======
- 指定月份的第某个月
- 时间类封装 某天的开始与结束
- 数据库链式调用封装
- curl 封装 / 发送文件 / 远程下载到服务器
- 下载进度条 / 断点续传
- 获取 win / linux 的mac地址
- exec 控制 cli 服务器的启动与停止 linux 版本
- 代码规范及技巧
- PHP的优化之道
- PHP 代码简洁之道
- PHP The Right Way
- PHP标准规范
- PSR-3 日志接口规范
- PSR-4 自动加载规范
- PSR-6 缓存接口规范
- PSR-7 HTTP 消息接口规范
- PSR-11 容器接口
- PSR-13 超媒体链接
- PSR-14 事件分发器
- PSR-15 HTTP 请求处理器
- PSR-16 缓存接口
- PSR-17 HTTP 工厂
- PSR-18 HTTP 客户端
- PHP注释规范
- php7+
- PHP WEB框架
- Slim 微型框架
- yaf
- RPC-yar
- 内置函数
- hyperf 高性能框架
- swoole
- 安装
- HttpServer
- WebSocket
- AsyncIO
- Swoole-Crontab
- 异步文件系统IO
- 异步Redis
- 异步MySQL客户端
- process
- Memory 内存操作
- Channel 连接池
- swoole与tp5
- 调试 swoole
- 示例
- websocket 绑定对象方法
- redis 事件订阅发布
- EasySwoole
- 技巧
- 对自定义类优化的方式
- 数据库
- 基础使用
- 定时器
- 自定义命令
- 自定义进程
- 自定义事件
- 异步任务
- Crontab 定时任务
- 日志
- 组件库
- 单例模式
- Di 容器 / 依赖注入
- 协程 / WaitGroup
- 内存 Table
- Csp 并发等待执行
- 队列 Queue
- SplArray
- SplBean 过滤表结构
- 缓存
- 热重启
- 控制器
- TP5
- 验证器
- 内置规则
- 数据库操作
- 数据添加或更新
- 静态增删改查 / 关联操作
- 日志操作
- 路由
- taglib-自制标签
- migrations 数据库迁移
- tp 测试
- TP3.2
- 数据库操作
- 关联表
- 增删改查与验证
- 前置与后置
- 发送邮箱
- Tp6
- 技巧
- 多应用的api版本控制
- phinx 迁移工具
- 单元测试
- 先使用修改器在验证
- 异常统一处理
- thinkcmf
- 快速入门
- 常用插件
- 小程序管理插件
- 手机微信登录插件
- 表单自动生成插件
- phalcon C框架
- 快速入门
- 脚手架教程
- Symfony
- Swoft
- laravel
- webman
- workerman
- Spiral Framework
- composer / C扩展
- 网络 / curl / 文件上传 / jwt 认证
- guzzle [19.8k] http 客户端
- php-curl-class[2.6k] 封装curl为类
- class.upload.php 文件上传
- codeguy/upload 文件上传
- php-jwt 封装 JWT 加解密
- 文本 uuid / 加密整数id / 中文转拼音 / 解析html
- uuid 生成uuid
- hashids 隐藏真实id
- pinyin 中文转拼音
- html-parser 类jquery解析 html
- i18n
- i18n 国际化
- gettext 国际化
- 数据验证 / mock数据 / 媒体类型
- faker 生成验证数据
- Analyzer 检验媒体资源类型
- Valitron [1.3k] 数据验证
- rakit/validation [399 star] 验证数据
- 支付
- OmniPay 多网关支付处理的框架
- 时间
- Carbon [14.6K]
- 日志 monolog / seasLog
- monolog php编写
- SeasLog C扩展
- 办公文件 pdf / word / excel / ppt
- Snappy 一个PDF和图像的生成库
- WKHTMLToPDF HTML转换为PDF
- PHPPdf XML转化为PDF和图片
- PHPWord - 处理Word文档
- PHPExcel 处理Excel文档
- PHPPowerPoint -处理PPT幻灯片
- 性能分析 xhprof
- xhprof - PHP性能追踪及分析工具
- 缓存 yac
- Yac 5.2+ 共享缓存
- 配置 yarconf / 解析 json xml ini yaml
- yarconf 7.0+ 读取配置
- config 解析 json xml ini yaml
- 队列 resque (基于redis) / beanstalkd
- Beanstalkd 队列
- php-resque 基于redis的消息队列
- web ui 管理 / redis / pgsql / mysql / mgdb
- phpRedisAdmin - Redis 管理
- phpPgAdmin - PostgreSQL管理工具
- phpMyAdmin - MySQL管理工具
- rockmongo - MongoDB管理工具
- ORM
- medoo 支持5大数据库
- Redis C 扩展
- mongodb C扩展
- mongo-php-library 官方基于C扩展到的封装
- MongoDB ORM
- ElasticSearch PHP 用于 ElasticSearch 的官方客户端库.
- 调试与性能
- nette/tracy 优化报错
- 状态机
- Finite 有限状态机
- 定时任务
- jobby
- 邮箱
- php-imap 接收邮箱
- PHPMailer 发送邮箱
- Sphinx - 全文索引
- JsonMapper 一个将内嵌JSON结构映射到PHP类上的库
- weichat 封装
- User Agent 检测
- class.upload.php 文件上传
- 官方库
- SPL 数据结构
- SplDoublyLinkedList 链表
- SplStack 栈
- SplQueue 队列
- SplHeap 堆
- SplMaxHeap / SplMInHeap 大排序
- SplObjectStorage 存储对象列表
- SplFixedArray 固定长度的数组
- 预定义接口
- Iterator while迭代
- ArrayAccess 数组式接口
- Serializable 序列化接口
- IteratorAggregate foreach迭代器
- Observer 观察者
- SPL 函数
- spl_autoload_register 自动导入类
- class_parents 返回指定类的父类
- spl_object_hash/spl_object_id
- SPL 常见异常
- SPL 迭代器
- DirectoryIterator 文件目录迭代器
- FilesystemIterator 文件迭代器
- GlobIterator 带匹配的文件系统
- ArrayIterator 把数组改成迭代器
- NoRewindIterator 只遍历一次
- RecursiveArrayIterator 递归迭代
- RecursiveTreeIterator 输出递归树
- SPL 文件处理
- SplFileInfo 文件信息
- SplFileObject 文件操作提供对象
- SplTempFileObject 临时文件
- Ctype 类型检测
- ctype_alnum 是否只有字母和数字
- ctype_alpha 是否是字母
- ctype_cntrl 是否是控制符(\n\t\r)
- ctype_digit 是否是整数
- ctype_lower / ctype_upper 是否是 小/大 写字母
- ctype_graph 是否是可见字符(空格不算可见)
- ctype_print 是否是可见字符(空格算可见)
- ctype_punct 是否是除字母,数字,空格外的特殊字符
- ctype_space 是否是空白字符
- ctype_xdigit 是否包含16进制字符([0-9 和 [A-Fa-f] ])
- 数组
- array_map-针对多个数组
- array_multisort 对二维数组进行排序
- array_filter
- array_walk - 对一个数组操作
- array_walk_recursive 递归
- filter 过滤器函数
- 预定义常量
- filter_has_var 存在指定变量
- filter_var 过滤变量
- filter_var_array
- filter_input_array 过滤外部变量
- filter_input
- 控制输出 flush
- flush 刷新输出缓冲
- 实战
- 安全转义参数
- htmlspecialchars html标签转实体
- addslashes 用反斜线转义(可用于数据库)
- quotemeta 转义特殊字符
- 日期/时间/日历
- format 参数列表 如 Y,m,d
- DateTime 时间函数
- cal_days_in_month 某个月的天数
- date_parse_from_format [函数] 根据日期格式转时间
- 异常处理
- set_error_handler
- set_exception_handler 自定义异常
- URL 处理函数
- get_headers 获取头信息
- http_build_query 数组转 query
- parse_url 解析 URL 返回数组
- urldecode 和 urlencode
- 字符串处理
- strstr 字符串的首次出现
- chunk_split 将字符串分割成小块
- chr / ord 字符与ascii转换
- str_split 将字符串转换为数组
- htmlentities / htmlspecialchars 等 html 编解码
- strip_tags 字符串中去除 HTML 和 PHP 标记
- uniqid 返回唯一值
- preg 函数
- preg_grep 从数组返回匹配的值
- preg_last_error 正则匹配错误
- preg_match / preg_match_all
- preg_replace 正则替换
- preg_replace_callback
- preg_split
- 进制转换
- bin2hex / hex2bin 字符串-16进制
- bindec / decbin 十进制-二进制
- octdec / decoct 八进制-十进制
- base_convert 任意进制转换
- 文件系统函数
- fopen / feof / fclose 适合文件和网页
- fread 按字节读取
- fgets 按行读取
- fwrite 写入文件
- file 一次读取整个内容,行遍历
- fscanf() 每行都根据格式循环输出
- file_get_contents 一次读取所有,返回完整字符串
- flock 文件锁
- disk_total_space 磁盘容量
- 文件 / 路径处理
- scandir 返回指定路径的目录和文件
- glob 使用 * 模糊搜索文件和目录
- is_dir / is_file
- opendir / readdir / closedir 循环输出文件/目录名
- dirname /basename 父路径 / 基础文件
- pathinfo 文件路径的信息
- realpath 真实路径
- copy / rename 复制 / 重命名
- touch / unlink 创建/删除
- file_exists 文件是否存在
- filesize 获取文件大小
- is_readable / is_writable / is_executable
- 文件权限
- fileperms 获取文件权限
- 反射
- ReflectionClass 反射类
- ReflectionExtension 反射扩展
- ReflectionFunctionAbstract
- ReflectionFunction 反射函数
- ReflectionParameter 函数,类的参数
- ReflectionProperty 类属性
- ReflectionType 参数或返回值的类型
- 协议
- php://
- input / output
- stdin / stdout / stderr
- memory / temp
- filter
- ftp:// 和 ftps://
- data://
- glob:// 文件路径模式
- 过滤器
- 字符串过滤器
- 转换过滤器
- stream
- Stream Filters
- Contexts
- socket
- PDO
- PDO::setAttribute 属性
- 加密扩展
- password_hash
- openssl
- 杂项函数
- sys_getloadavg 获取系统的负载
- hrtime 微妙时间戳
- ignore_user_abort
- uniqid
- sleep/usleep
- imap 邮箱
- Session
- Callback 类型
- exec 执行结果以数组返回
- socket_create 操作
- soap 调用 webserver
- C / C++框架 编写扩展
- 原生编译
- 引用 加载动态库(.so) 文件
- 参数、数组和Zvals
- Zephir 开发PHP扩展
- 安装
- 快速入门
- php-cpp C++开发扩展
- 安裝
- 技巧
- 语法
- 变量
- 常数
- 输出和错误
- 函数
- 指定参数
- 调用PHP函数
- Lambda函数
- 构造函数
- 魔术方法
- 基础SPL接口
- 扩展类的魔术方法
- 类属性
- 异常
- 读取php.ini变量
- 扩展回调
- 命名空间
- FFI PHP扩展方式
- pear / pecl
- pecl c 扩展
- 在多 php 版本中指定
- pear php 扩展
- 安装/编译
- oneinstack 一键配置
- lnmp /lamp 脚本安装
- 配置 Let's Encrypt
- 配置 thinkphp
- dnmp docker 安装 LNMP
- ==== php 环境一键安装 ====
- Centos
- Ubuntu
- macOS
- ==== 包安装 ====
- apache
- nginx
- php
- 安装 GD 扩展
- 安装 openssl 模块
- ==== 编译环境安装 ====
- window apache/php
- window nginx/php
- PHPUnit
- 编程写测试
- 添加测试的依赖
- 数据供给器
- 对异常进行测试
- 对输出进行测试
- 基境 测试初始化与还原
- 数据库测试
- php 扩展
- opcache 缓存编译
- 常用正则
- php.ini 最佳实践
- php 调用 jar包
- Golang
- 知识碎片
- 无锁编程
- 调度器
- 预防CSRF攻击
- 避免XSS攻击
- 避免SQL注入
- 存储密码
- 设计模式 / 规范 / 性能 / 技巧
- 设计模式
- 单例模式-数据库单例
- 值选项模式
- 组合模式
- 策略模式
- 规范
- 性能优化
- 技巧
- 高性能
- 字符串拼接性能
- 切片性能及陷阱
- for 和 range 的性能比较
- Reflect 提高反射性能
- 逃逸分析
- 死码消除与调试(debug)模式
- sync.Mpap 与 加锁map
- 项目布局
- 项目布局一
- 项目布局二
- DDD分层架构
- 数据类型
- 切片类型( slice)
- 场景
- 请求/响应/错误码设计
- gin 对 handle的封装
- 带超时的 sync.WaitGroup
- 优雅关闭协程
- 控制协程的并发数量
- 并发非阻塞缓存
- 守护其他进程的代码
- 各类型转 sturct
- 注册为window 的服务
- go 注册
- sc 注册
- nssm 注册
- udp 打洞
- udp 打洞转 tcp
- Reader 用法
- i18n 本土化
- 压缩编译体积
- 第三方库
- 操作 DOM
- goJquery 像 jQuery一样操作DOM
- ORM
- gorose -链式调用
- GORM
- 技巧
- 获取一对多
- dbx 支持缓存全表数据
- sqlx
- 路由 / http客户端 / websocket
- httprouter 实现RESTful 风格
- mux - 路由
- fasthttp 比 net/http 快10倍
- GoRequest http 客户端
- gorilla库 路由 /参数转结构体
- gorilla/mux URL路由和分发器
- gorilla/schema 参数转换为结构
- websocket
- balloons-websocket 封装好的 websocket
- melody 优雅的websocket
- nhooyr-websocket 性能好于gorilla
- gorilla/websocket [14.5K]
- 缓存 / 并发
- go-redis
- gocache 封装 redis,memcached,内存的缓存
- cache2go 带过期回调的缓存
- go-cahce 类memcached 可存文件断电恢复
- tiedot 内存NoSQL数据库
- Gcache 带过期,带操作事件,支持 LFU,LRU ,ARC
- concurrent-map 支持并发的map
- bigcache 分片map缓存,value 只能存byte
- golang-set set的go实现
- atomic 支持更多类型
- conc 更好的结构化并发
- map转struct / 打印结构体
- mapstructure map 转 struct
- litter 优雅打印结构体
- 数据结构
- 结构算法库 Lists / Sets / Stacks / Maps / Trees
- 工具库
- pie 常用数组操作
- lo 类似 Lodash
- 连接池
- go-common-pool
- ants
- 序列化库 json / ini / yaml
- jsoniter 官方更高效的 json 库
- easyjson免运行时反射的json化
- gjson 从json中取值或判断
- simplejson 处理未知结构的json
- props 解析各种 ini / yaml 等
- 支持Unmarshal map 转配置
- viper 11k Star 支持yaml,ini 支持 env ,命令行 等
- hash / uuid
- xxhash 返回整数类型
- uuid
- Log 日志库
- zap 高性能日志
- Logrus 可插拔日志
- GUI
- fyne 简单难看的 GUI
- go-qt
- wails 桌面gui go + vue
- webview 用 html 可直接编译跨平台 app
- vugu vue+WebAssembly
- termui [11.6k]
- 命令行 / TUI
- urfave/cli [14.3k] 命令行
- kingpin 简单强大命令行
- cobra [18.2k] 专业级命令工具
- x-mod/cmd 空格隔离参数
- mpb 进度条
- progressbar 另一个进度条
- rivo/tview [4.5k] 命令行ui
- cute 漂亮的输出
- bubbletea 强大的 TUI
- 检验 validator
- validator
- 定时器
- cron 简单,不可修改的定时器
- cronlib 可修改任务 推荐
- robfig/cron 支持cron 和 固定时间
- 加密库
- thinkoner/openssl 可支持 ECB、CBC等
- 自己封装的加密库
- 身份验证和OAuth
- authboss 认证
- go-oauth2-server 符合规范的OAuth2服务器
- 开源 IM
- tonyboxes/imgo
- GoBelieveIO/im_service
- alberliu/gim [1.2k]
- 流量控制 / 熔断器 / 容错
- hystrix-go
- 示例
- Hello World
- http 示例
- dashboard 可视化
- Sentinel GO 流量控制组件
- QPS
- 热点参数限流
- 熔断降级
- 静态资源打包
- go-bindata 静态资源打包进执行文件
- 爬虫/无头浏览器
- colly [11.9k]
- chromedp 可控制是否显示浏览器[9.6k]
- 实例
- 启动访问某个网站
- 访问网站并且截图
- 设置cookie,保持登录状态
- 下载文件
- emulate 设备模拟
- 代理
- goproxy 代理
- 聊天机器人
- chatbot
- 图像
- imaging 图像处理
- gg 图像处理
- 单元测试
- gomonkey 打桩函数 - 推荐
- goconvey 测试结果带UI
- sqlMock
- redisMock
- httpmock
- Testify 支持断言,写法更简便
- gocheck 测试框架
- faker 生成假数据
- 依赖注入
- fx User开发的依赖注入
- 注册一个http
- 添加 handle
- 添加日志
- 注入接口
- 注入多个接口
- MIME 文件检测
- mimetype 类型检测 [1.2k]
- filetype [1.9k]
- 全文索引
- bleve
- fsnotify 文件监听
- gopay 支付集合
- .env 环境变量
- 哈希算法 转整数
- gopsutil 系统性能数据
- 官方包
- C
- 简单调用 c函数
- c与go 类型转换
- go 类型转C类型
- panic / recover
- panic+recover简化错误处理 模块必学
- error 自定义错误结构体
- unsafe
- archive
- tar
- zip
- bufio
- bytes
- compress 压缩
- gzip
- zlib
- container 数据结构
- heap
- list
- ring
- index/suffixarray 字典树
- Context
- crypto 加密
- rsa
- md5
- sha1
- sha256
- sha512
- tls
- database
- sql
- encoding
- encoding
- base32
- base64
- binary 序列化
- csv
- gob
- hex
- json
- xml
- errors
- expvar - 线性安全全局变量
- flag
- fmt
- 格式化输出格式
- html
- html
- template
- image
- image
- color
- png
- draw 图像合成函数
- gif
- jpeg
- io
- io
- ioutil
- log
- syslog
- math
- math
- rand
- net
- net
- http
- cookiejar 自动存储cookie
- httptest http的mock
- httptrace 追踪http
- httptest
- httputil 反向代理,打印头信息
- pprof
- rpc
- smtp
- url
- textproto
- os
- os
- exec
- signal
- user
- path
- path
- filepath
- plugin
- reflect
- regexp 正则
- runtime
- runtime
- debug
- pprof
- trace
- sort
- strconv
- strings
- sync
- atomic
- testing
- doc
- testing
- quick
- text
- scanner
- template
- time
- unicode / utf8
- unicode
- utf8
- utf16
- embed 嵌入
- js WebAssembly
- 示例
- golang.org/x
- net
- ctxhttp 带 ctx 的请求
- nettest
- netutil
- websocket
- oauth2
- crypto
- ssh
- text
- xorm / xorm+odbc
- go 适配 odbc
- 其他技巧
- 查询条件方法
- 关联查询
- 缓存
- 增删改查前后置的操作
- 同时支持三个数据库需求
- cmd 自动生成结构
- 嵌入 logrus
- web框架 / 微服务框架
- gin 框架
- 语法
- 中间件
- 参数模型绑定
- hmtl 渲染
- JSONP
- BasicAuth 基础认证
- 路由
- 输出格式
- 重定向
- 异步处理
- 静态资源
- 实例
- HelloWorld
- go-gin-example
- gin-vue-admin
- 测试
- beego
- 模型操作
- generate 生成的模型操作
- 一对一查询
- 一对多
- 打印日志
- 路由
- iris web 框架
- kratos bilibili 开源
- gf web/tcp 4.3K集大成框架
- gf-cli 命令行工具
- tcp 组件
- endless 热更新
- echo
- ====== web 库 ======
- Goji微框架
- go-zero [5.2k] web / 微服务框架
- go-micro 14.9K 微服务框架
- 快速开始
- 技巧
- 命令
- micro
- dashboard
- 示例
- HelloWorld
- 用户模块示例
- Jupiter 2.5K 微服务框架
- ====== 微服务 ======
- go-admin
- Gin-Vue-Admin
- gfast
- Simple Admin
- ====== Admin 后台 ======
- RPC / ARPC
- net/rpc
- net/rpc/jsonrpc 不支持http
- RPCX 分布式的RPC
- 元数据 / 分组
- 心跳
- 单服务例子
- 多服务例子
- 异步回调例子
- Fork 发送多个rpc有个成功
- broadcast 广播模式
- UI管理工具
- erpc
- arpc
- tcp / tcp 框架
- 最简单的 tcp 连接
- 面向对象,带有类型的tcp连接
- tcp binary 设置协议头
- 完善的tcp 服务端/客户端管理
- tcp server 框架
- zero - [152]
- xtcp - [101]
- gotcp - [458]
- Zinx - [3K]
- Go Web 编程
- go web
- websocket
- go cli
- godoc
- 约定
- Example
- go build
- buildmode 编译不同结果
- 编译 *.so 的动态链接
- pgp 示例
- 条件编译
- +build 条件编译
- go:build 推荐
- 文件后缀编译
- go:build 条件编译
- mod
- gcflags 逃逸分析等
- asmflags
- -ldflags 编译优化等
- go run
- go install
- go get
- go generate
- go test
- -bench 压测
- http 测试
- fuzz 模糊测试
- go mod
- go tool trace 性能追踪
- go tool pprof 性能追踪[推荐]
- 封装 pprof 可指定端口
- statsviz 运行时统计信息
- go tool dist
- work
- 编译工具
- xgo 一键编译多平台
- goreleaser 快速上传各架构编译到github
- go 国产化编译
- air 监听go,实时编译
- golines 自动换行
- go 支持 oracle
- go 调用dll
- dlv 远程调试
- 服务器
- Git
- 知识
- codeowners 指定目录所属
- 命令
- config
- commit
- rebase
- merge 分支合并
- cherry-pick
- checkout 切换/创建分支
- branch 创建/删除分支
- clone
- diff
- reset
- revert 取消某个提交
- rm / mv
- mergetool 可视化合并冲突
- log / reflog
- stash 搁置
- tag
- show
- pull / fetch
- push
- remote
- submodule 子模块
- shortlog log日志汇总
- archive 打包
- sparse-checkout
- git lfs 管理大文件
- rev-list
- filter-branch 历史中删除不该提交的文件
- bisect 二分查找
- format-patch 导出补丁
- worktree 便捷clone
- 技巧
- HEAD^ / HEAD~ 差别
- git 使用 rsa
- window 重新设置账户密码
- commit 规范
- 生成 Change log
- 规范流程
- commit 图标
- 分支命名
- centos git 服务器
- Nginx
- 技巧
- location 匹配
- 场景
- http 代理 / 超时设置
- 静态站点 / 动静分离
- 负载均衡
- 限流配置
- HTTP/2 服务推送
- 匹配路径跳转
- 缩略图
- 优化
- reuseport 负载均衡 [nginx>1.9]
- linux 内核参数优化
- nginx.conf 配置
- open_file_cache
- 自定义 access.log 格式
- Apache
- 常见场景
- .htaccess 场景
- 切割日志
- 改写重定向权限
- rewrite日志功能
- ip限制
- 目录列表功能
- 响应头的 Server 信息
- 代理 / 重定向
- 配置 https
- 添加响应头信息
- 限制目录访问
- 某目录不解析 php
- 允许跨域
- mpm 三种并行处理模块
- Caddy 类Nginx
- Caddyfile
- Caddyfile 指令
- root
- header
- php_fastcgi
- rewrite / try_files / uri 代理
- redir 重定向
- encode 压缩
- basicauth http认证
- handle / handle_path 类似nginx 的location
- reverse_proxy
- metrics 统计
- 场景
- 设置静态文件
- 自动跳websocket
- 真实域名设置https
- 代理
- php 服务
- 命令
- 监控日志
- OpenResty 带lua 的nginx
- ====== 常用工具 ======
- protobuf 协议
- 安装
- protobuf
- gogo
- protoc 命令
- 语法
- proto3的变化
- 示例
- golang 实现
- grpc
- golang 实现
- ====== 传输协议 ======
- opentracing 标准
- jaeger UI 优化,更简单
- 实例
- 带 context 的追踪
- 以 span 追踪
- http 形式访问
- 使用Inject和在进程之间
- rpcx 调用 [通过 conetxt ]
- rpcx 调用[通过传递 string(tranid,spanid,parentSpanId)]
- Zipkin
- ====== 链路追踪 ======
- jenkins 持续集成/交付
- 推荐设置
- 技巧
- webhook -通过gitlab 触发
- 远程触发编译
- 添加节点
- 构建一个go
- 常用环境变量
- 构建方式
- pipeline
- 设置环境变量
- 实例:Jenkinsfile
- 示例:使用多个agent
- 参数化构建
- MultiJob Project (新版弃用)
- 插件
- Go Plugin 插件
- git 无变化跳过构建
- Folders Plugin 创建任务分组,方便管理
- Multiple SCMs Plugin [新版本弃用]
- 生成时间戳
- FTP 传送到应用服务器
- Publish Over SSH 发送到远程
- 角色及权限管理
- 备份
- pipeline
- blue ocean 可视化 pipeline
- junit 测试报告
- Cobertura Plugin 可视化覆盖率
- cds 持续集成
- Travis CI 教程
- GitLab
- 持续集成 CI/CD
- 安装Runner环境
- .gitlab-ci.yml 配置
- CI/CD Examples
- 备份还原
- Gitea git 自托管
- ====== 持续集成 ======
- Zabbix 服务器监控
- prometheus 时序处理,报警系统
- 概念
- 工作流程(推荐阅读)
- 数据类型
- 作业和实例
- 联合
- 命名
- 安装
- 组件
- prometheus.yml 配置
- 数据模型
- PromQL
- 运算符
- 函数
- 查询
- HTTP API
- 记录规则
- 警报规则
- 配置
- 告警规则
- 示例模板
- Alertmanager
- 配置 Alertmanager
- 实例
- 监控程序启动
- 监控cpu,内存告警
- 服务发现
- 基于文件的服务发现
- 实例
- 导入 prometheus
- 配置三个 node
- go demo
- grafana 图形分析器
- Grafana 变量
- 报警
- 配置邮箱接收
- 配置 webhook
- 通知策略
- 实例
- 开源监控方案
- go+influxdb+grafana 制作日志监控系统
- 数据库中获取数据展示
- goaccess 日志分析工具
- countly-server 网站统计
- go-netflow 监控程序流量
- tproxy 监测 grpc 与mysql 连接
- Monyog 监控mysql
- uptime-kuma 多功能监控
- SamWaf 网站防火墙
- kyanos 带ui 的tcpdump
- ====== 监控 ======
- metersphere 测试/压测/报告
- ====== 测试 ======
- beats 轻量型日志采集器
- Flume 分布式日志
- fluentd 日志处理
- 安装
- 配置文件
- 语法
- 公共参数
- 插件
- 输入插件
- tail 监听文件
- forward 接受到其他fluent
- tcp
- http
- exec 接受程序输出
- monitor_agent 监视器
- 输出插件
- file
- forward 转发到其他fluent
- http
- copy
- roundrobin 轮询输出
- stdout
- elasticsearch
- mongo
- mongo_replset
- 容器开发
- 实例
- HelloWorld
- PHP应用
- apache日志输出到mongod
- Addax 异构数据同步
- 示例
- Hello World
- Elasticsearch
- Loki grafana 的日志收集
- ====== 日志/数据 处理 ======
- Bazel 构建
- Make
- 技巧
- ====== 构建工具 ======
- HAProxy
- 安装与示例
- 配置详解
- 示例
- 搭建L7负载均衡器
- 搭建L4负载均衡器
- 使用Keepalived实现高可用
- Keepalived 虚拟ip
- ====== 负债均衡 ======
- pyroscope-server pprof 定位性能问题
- 示例
- go 示例
- ====== 持续profiling服务 ======
- proxmox 虚拟机管理
- Vagrant
- opentofu 云化管理,可回滚docker等
- Docker
- 规范的docker部署案例
- 场景
- phpstorm调用docker
- Docker 命令
- docker push / pull
- docker search
- docker images
- docker rmi
- docker commit 定制镜像
- docker tag 镜像标签
- docker save 导出镜像
- docker history 镜像创建历史
- docker buildx 构建多种系统架构
- ====== 镜像 ======
- docker run
- docker update 更新run的设置
- docker stop / start / restart
- docker pause / unpause 暂停/启动
- docker kill 杀到运行的容器
- docker rm
- docker attach / exec 进入容器
- docker export / import 导入导出
- docker ps 列出容器
- docker port 映射的端口
- docker top 类似top
- docker logs 容器日志
- docker inspect 容器元数据
- docker stats 资源情况
- docker cp 复制目录到容器
- docker diff 容器结构变动
- docker rename 重命名
- ====== 容器管理 ======
- docker login
- docker logout
- ====== Docker Hub ======
- docker swarm 管理集群服务
- docker-machine 模拟安装与使用
- vm 安装和使用
- docker service
- docker node 管理集群节点
- docker stack 文件方式编排
- 示例:部署WordPress
- ====== 集群管理(Swarm) ======
- docker network
- network create
- network connect
- network disconnect
- network inspect 显示细节
- network ls
- network prune 删除所有未使用网络
- network rm
- docker volume
- volume create
- volume inspect 详细信息
- volume ls
- volume prune 修剪
- volume rm
- docker system 系统管理
- system df 磁盘总体情况
- system prune 移除不用资源
- system info 等于 docker info
- system events 等于 docker events
- docker info docker 信息
- Docker-compose
- 命令
- docker 命令转 docker-compose
- Docker-machine 编排
- dokcer-machine create
- 安装
- Dockerfile 文件
- ENTRYPOINT 入口点
- docker-compose.yml
- 指令
- 私有仓库
- docker-registry
- Harbor
- UI界面
- lazydocker docker 命令行ui
- WeaveScope docker网页可视化
- lazykube k8s 界面
- Portainer 单机,集群可视化管理
- Rancher 企业级容器编排
- 实例
- redis 单机
- redis 集群
- docker-compose 搭建 lamp 应用
- php实战项目
- K8S
- 安装
- 容器可ping 外网 / 给容器局域网 ip
- 远程使用docker
- 缩小容器体积
- ====== 虚拟化 ======
- ffmpeg 音视频处理
- 实例
- 查看文件信息
- 转换编码格式
- 调整码率
- 改变分辨率
- 提取音频
- 截图
- 裁剪
- 为音频添加封面
- SRS 流媒体服务器
- ====== 流媒体 ======
- Casbin web访问权限控制
- Model 与常用配置文件
- 示例
- Hello World
- Http 示例
- gin 示例
- Casdoor 集成登录
- ====== web 组件 ======
- semgrep 静态代码扫描工具
- shellcheck 脚本lints
- ====== Lint ======
- Apollo 强大但部署麻烦
- Nacos 简单方便
- ====== 配置中心 ======
- 宝塔 面板安装
- 1Panel 运维管理
- 雷池 站点防护
- ====== Linux 面板 ======
- libreoffice 操作/预览office
- soffice 命令
- linux 中文字体问题
- 示例
- 预览 office(word,ppt,xsl) / pdf
- tika 文档转文字
- tika-server
- tika-app
- 示例
- http 请求获取文本内容
- go 与jar 配合
- ====== 文档 ======
- 禅道
- 快速入门
- ====== 项目管理软件 ======
- buildroot 交叉编译
- CGO 交叉编译实例
- onlyoffice 在线office编辑
- 安装
- 编译
- ubuntu16.04 编译
- 在uos_arm编译[弃]
- 修改字体
- 示例
- Hello-World
- ebpf 性能追踪
- Nexus Repository 统一包管理器
- go
- webdav
- chsrc 镜像自动设置
- certbot 自动配置https 证书
- Supabase 开源代替Firebase
- ====== 视频会议 ======
- jitsi-meet 视频会议
- 前端
- HTML
- 设计规范
- Web前端兼容性问题
- 手机端
- 尺寸单位
- rem 方案的示例
- JS / jQuery 插件
- 轮播图 滑动鼠标
- slick 鼠标滑动事件
- swiper 鼠标滑动 案例丰富
- 时间
- Moment 时间解析模块
- jQuery jquery-date-range-picker 日期区间
- jQuery daterangepicker 日期区间(美观)
- jquery bootstrap-datetimepicker 日期和时间
- 图片
- viewerjs 图片预览 功能全无需jquery
- grade.js 根据图片生成背景色
- js-cloudimage-360-view 360度旋转观看图片的 JS 库
- pagemap 网页右上角缩略图
- JQuery jqzoom.js-类似淘宝的图片放大
- jQuery lightBox-图片顺序预览
- JQuery Jcrop 图像裁剪
- X6 图形绘制工具
- 图形渲染
- D3
- SnapSVG svg 绘制库
- pixijs 绘制 WebGL,Canvas
- gojs
- three.js 做3D VR
- css3d-engine 精简版 treejs
- pano2vr 方便快速的3D-VR
- echarts
- 示例
- 动态时序图
- smoothie.js 监控图
- 工具库
- 下划线库 -有两个库
- licia 常用开发库
- Ramda 函数式库
- API
- 比较运算
- 数学运算
- 逻辑运算
- 字符串
- 函数
- 数组
- 对象
- MOCK
- json-server 伪造 json 接口
- mock.js 随机数据
- 文件上传 / 下载
- [推荐]filepond 文件上传 9.6K start 可编辑图片
- downloadjs 可让ie 支持文件下载重命名
- jQuery 多文件上传进度条 Huploadify
- 单元测试
- mocha 20K
- jest 33.2K
- 匹配器
- cypress 测试
- 视频播放
- flv.js b站开源
- jessibuca 支持webrtc
- media-chrome 视频播放器
- 大屏
- 拖拽式 大屏框架
- DataV 基于vue2 大屏
- 加密库
- CryptoJS
- 网页编辑器
- monaco-editor 网页版编辑器
- codemirror
- 移动端相关库
- better-scroll 更好的滚动
- Pxmu.js 通知,loading 等 [11 star]
- postcss-pxtorem 自动px 转 rem
- jQuery
- jQuery springy 关系可视化
- jQuery zTree 树插件
- jQuery select标签中搜索option
- jQuery jQueryUI
- 拖拽和放置
- 缩放
- 特效
- 滑动选择
- 排序
- 折叠面板
- 进度条
- 标签页
- autocomplete 自动完成
- jQuery form 表单提交插件
- jQuery Validate 验证
- 使用方式
- 校验规则
- 实例 validate与 jquery form
- jQuery Cookie
- jQuery Boostrap autocomplete
- jQuery Growl 侧边消息提醒
- jQuery noty 通知
- jQuery Migrate
- Slidev makedown 生成 PPT
- 语法
- makeDown
- Layouts
- theme
- 基础属性
- PlantUML
- components
- ORM
- typeorm
- 实体
- 一对一等处理
- 查找
- 生成器
- 验证
- 对象数据库
- sql.js 网页sqlite 数据库
- 示例
- node 使用
- web 使用
- 获取远程库
- pglite 网页版 pgsql
- prismjs 语法高亮
- introjs 新手引导
- RequireJS 客户端模块管理
- cleave.js 格式化输入框内容
- fusejs 搜索功能
- tesseract.js 文字识别
- fullPage 全屏滚动网站
- mjml 转为相应式邮箱html
- progressJs 头部进度条
- instant.page 链接预加载
- pdf.js
- Yjs 协议编辑
- 前端框架
- layui
- 常用方法
- layui.laytpl 前端模板
- 模块定义
- 常用库
- form_table
- Cron表达式组件
- notify
- layui-soul-table
- xm-select
- tableTree
- croppers 截图上传
- 技巧
- 打开表单
- 表单格式
- layuiAdmin 官方
- LuLu 灵活前端
- ====== 桌面框架 ======
- Frozen UI
- WeChat UI
- MUI 对移动端做了优化
- AUI js 框架
- ====== 移动端 ======
- ficusjs 使用 Web component
- ====== 原生 component ======
- htmlx 无js 页面交互
- CSS
- 知识
- 最佳网页宽度
- 产生空白间隙的原因
- 所有元素平滑动画
- 技巧
- 居中 / 对齐
- 顶端观看显示进度条
- 图片自适应同步的截取
- 元素硬件加速
- 滚动条样式
- 给列表加竖线
- 文字超出隐藏并显示省略号
- 打字效果
- 语法
- translate 移动
- transform 转换
- transition 过渡
- animation 动画
- ====== 动效 ======
- flex
- grid
- ====== 布局 ======
- 函数
- CSS 变量
- vw,ch 等长度
- box-sizing 属性
- ====== 技巧 ======
- Font Awesome 字体
- bootstrap v3
- 样式快速入门
- 基础样式
- 布局
- 文本
- 列表
- 表格
- 表单
- 按钮
- 图片
- 辅助类
- 关闭按钮
- 三角符号
- JavaScript 插件
- 模态框
- 标签页
- tooltip 提示
- 按钮 设置加载
- normalize.css 初始化
- animate.css 动效
- tailwindcss css类样式
- 安装
- 定制
- 配置 文件
- 组件
- 语法
- container 容器
- Box Sizing
- Display
- 浮动 / 清除浮动
- Object 可控替换元素
- overflow 溢出
- Overscroll 滚动区域边界时的行为
- position
- Top / Right / Bottom / Left
- visibility 可见性
- Z-Index
- Flex
- Justify Content 控制flex/grid的主轴
- Align Content
- Align Items
- Grid 网格布局
- Justify Items
- 间距
- 内边距 / 外边距
- space 控制子元素之间的间隔
- UnoCSS 类似 TailwindCSS
- water.css [7k] 无需class的框架
- simple.css [2.5k] 无需class的框架
- open-props css变量框架
- ====== css 框架 ======
- Sass/Scss与Less区别
- less 不依赖ruby
- z.less 库- 预定义常用函数
- stylus
- Sass 靠缩进继承
- scss = Sass 3 靠括号继承
- ====== css 库 ======
- jQuery
- 插件
- jQuery 制作插件
- 常用方法
- bind / on / click
- js-ajax-* 实现异步
- 全局body loading 为wj实现
- 根据 event.timeStamp 防抖
- 设置select 的默认值
- 图片放大
- 图片懒加载
- 文件异步下载 / 带百分比
- 文件异步上传 / 带百分比
- 拖拽上传文件
- 常用指令
- AJAX
- 全局 Ajax 事件处理器
- $().ajaxPrefilter ajax前置与后置监听
- $.get
- $.getJSON
- $.getScript
- $.post
- $.ajax
- $().load
- .serialize() / .serializeArray()
- DOM
- .addClass() / .removeClass()
- .hasClass() / .toggleClass()
- .attr() / .removeAttr()
- .prop() / .removeProp()
- .html() / .val() / .text()
- .data() / .removeData()
- .after() / .before()
- .append() / .appendTo()
- .prepend() / .prependTo()
- .clone()
- .detach() / .empty()
- .each() 遍历 jQuery 对象
- .get()
- ====== 元素选择 ======
- .eq() / .first() / .last()
- .filter() / .find() / .has()
- .next() / .prev()
- .parent() / .parents()
- CSS
- .css()
- .height() / .width()
- .innerHeight() / innerWidth()
- .outerHeight() / .outerWidth()
- .position()
- .scrollLeft() / .scrollTop()
- 动画 / 特效
- .animate()
- .delay() / .finish() / .stop()
- .fadeIn() / .fadeOut() / .fadeTo()
- .hide() / .show() / .toggle()
- .slideDown() / .slideUp() 滑动
- 浏览器事件
- .scroll()
- .resize()
- Event 对象
- event.currentTarget
- event.target
- event.data
- event.isDefaultPrevented()
- event.which 按键监听
- event.pageX / event.pageY
- event.preventDefault()
- event.stopPropagation()
- event.timeStamp
- event.result
- event.type
- event.key
- 事件监听
- .on()
- .one() 触发一次
- .trigger()
- .off() 移除事件
- 表单事件
- .blur() / .focus()
- .focusin() / .focusout() 支持冒泡
- .change()
- .select()
- .submit()
- 键盘事件
- .keydown() / .keypress()
- .keyup()
- 鼠标事件
- .click() / .dblclick()
- .contextmenu() 右键
- .hover()
- .mouseup() / .mousedown()
- .mouseenter() / .mouseleave() 鼠标进入 / 移开
- .mousemove() 移动
- .mouseout() / .mouseover() 冒泡移入/移除
- 工具类
- .grep() 过滤数组
- .map() 转为另一个数组
- .merge() 合并数组
- .each() 遍历数组和对象
- .inArray()
- ==== 数组 ====
- $.param / $().serialize / $().serializeArray()
- .extend() 合并对象
- ==== 对象 ====
- .trim() 去掉首尾空格
- .parseHTML() / .parseJSON() /.parseXML()
- ==== 字符串 ====
- .isArray()
- .isEmptyObject()
- .isFunction()
- .isNumeric()
- .isPlainObject()
- .type() 可区分 array 与 object
- ==== 类型判断 ====
- .now() 时间戳
- 函数 compose
- callbacks.add() 添加函数
- callbacks.empty() 清空函数
- callbacks.fire() 调用函数
- JavaScript
- 知识
- 同源限制
- 不同域跨窗口通讯
- typeof / instanceof
- JS 语法树
- 设计模式
- 严格模式
- 性能优化
- scrollHeight 等各中高度
- 技巧 / 场景
- onClickOutside 判断是否在严肃外
- clientX .pageX,screenX,offsetX 区别
- getBoundingClientRect 定位元素
- 下拉示例
- 自定义去除字符
- 打印时间戳
- 类型转换 黑魔法
- 只初始化一次
- 防抖 / 节流
- 动画
- 滑动删除
- ====== 技巧 ======
- this / bind / call /apply
- 函数式编程 / 柯里化
- compose 函数组合
- 原生面向对象写法
- 示例:canvas小球碰撞
- new 带prototype的函数
- ES5 实现继承
- 大文件断点续传
- ====== 场景 ======
- 插件
- JS 制作插件
- 实例:拖拽列表插件
- 图片/文件拖拽显示信息
- js 原生提示
- 手写签名
- JS 模块
- ES6 [推荐]
- CommonJS 模块
- ES6,7,8语法
- Promise
- Class
- Map / Set
- async / await
- 浏览器对象
- 浏览器环境概述
- window 对象
- Location 对象
- Navigator 对象
- Screen 对象
- XMLHttpRequest 异步请求
- console 对象
- URL 解析
- URL 的编码和解码
- URLSearchParams 对象转url参数
- 标准库 / 对象
- Object 对象
- Number 对象
- Array 数组
- String 对象
- Math 对象
- Date 对象
- RegExp 对象
- JSON 对象
- FormData 对象
- ArrayBuffer / Blob 对象
- File / FileList / FileReader 对象
- TextEncoder / TextDecoder
- DOM
- DOM,Node 接口
- Document 节点
- Element 等节点
- CSS 操作
- 事件
- EventTarget 事件通用接口
- Event 对象
- 鼠标事件
- 键盘事件
- 进度事件 - 加载外部资源
- 触摸
- 实例 手写
- PointerEvents 更通用的touch
- 拖拉事件
- 窗口事件
- 剪贴板事件
- GlobalEventHandlers 接口
- HTML 标签
- <a>
- <img>
- <input> 元素
- Web Api
- Fetch
- Response 对象
- Request 对象
- Headers 对象
- 实例
- POST 请求
- JSON 请求
- 上传文件
- 获取数据流-如图片
- 逐行处理文本文件
- 自定义请求 Request
- sessionStorage / localStorage
- Intersection Observer 元素可见判断
- PerformanceObserver 性能监听
- ResizeObserver 监听元素大小
- TextDecoder / TextEncoder
- Gamepad 游戏手柄
- geolocation 地理位置
- 网页可见性 状态监听
- Notification 系统通知
- 画中画API
- Pointer events 指针事件
- Vibration API 震动
- Audio API 声音
- Web Share API
- WebCodecs API 帧和音频块的访问
- Mutation Observer 监视 DOM 变动
- 数据类型
- TypeScript
- 技巧
- 声明文件
- 全局变量
- npm 包中使用
- UMD 库
- 模块插件
- tsconfig.json
- 语法
- 基础类型
- 装饰器(decorators)
- 命名空间
- 模块
- 高级类型
- 类型兼容性
- 接口
- 类
- 函数
- 泛型
- Record
- 高级类型
- ====== 基础 ======
- SVG
- 语法
- js 操作 SVG
- canvas
- 绘制矩形
- 绘制路径
- 绘制直线
- 绘制圆弧
- 绘制贝塞尔曲线
- 绘制文本
- 绘制图片
- 样式与颜色
- 状态的保存和恢复
- 变形
- 平移
- 旋转
- 变形矩阵
- 合成
- 裁剪路径
- 动画
- WebSocket
- 库
- websocketd
- socket.io
- WebGL
- twgljs 轻量级库
- WebRTC
- WebRTC 使用流程
- 概念
- 处理浏览器中的媒体
- 两种传输方式示例 视频 / 文本 / 流文本
- 需要信令通道
- 教程
- 媒体设备
- 对等连接入门
- 远程流
- 数据通道
- TURN服务器
- API 接口
- RTCPeerConnection
- getUserMedia
- 示例
- examples
- php 实现服务器与web端
- 捕获窗口
- 捕获摄像头
- 本地使用 RTCPeerConnection
- DataChannel
- 远程点对点
- 第三方库
- SimpleWebRTC [4.5k]
- webRTC.io [1.6k]
- ==== 视频聊天 ====
- peerjs 点对点链接
- 点对点传输文字
- 第三方项目
- p2p.chat
- im
- WebAssembly
- 示例
- hello-world go版
- SSE (EventSource)
- 示例
- Web Workers 多线程
- 示例
- 通用的异步 eval()
- Service Worker API
- PWA 提升WebApp
- Broadcast Channel 广播
- IndexedDB
- 库
- Dexie.js 封装 IndexedDb
- ZangoDB
- JsStore 带SQL语法
- lovefield 仿 SQL [6.8k]
- ====== 进阶 ======
- NodejS
- npm 插件
- mongoose 操作 mongodb
- sequelize 数据库orm
- pm2 启动 node
- nodemon 监控文件变化自动重启
- cookie-parser 设置 cookie
- Puppeteer 控制浏览器
- Robotjs 桌面自动化
- anyproxy 代理
- pkg 编译成二进制
- 文件操作
- 网络操作
- 进程管理
- Express 框架
- 模块化编程
- Koa web 框架
- Deno 代替node
- bun
- 命令
- bunfig.toml
- 接口
- API
- Bun APIs
- Web APIs
- Node Js
- ====== 后端 ======
- Vue
- 问题
- 运行网页,但是报缺少 Node 的相关库
- 技巧
- 异步加载
- 动画,与动画库的使用
- webpack 构建多页面
- vue3.0 语法
- reactive,ref,watch,watchEffect,computed
- 子组件
- TypeScript
- 性能优化
- 测试 Vitest
- 动画
- 依赖注入 Provide与Inject
- Suspense 异步加载组件
- directives 自定义指令
- 组合式函数 useXXX
- 插件
- vue 库
- axios 请求
- vue cli 3.0 配置
- qrcode.vue 二维码
- Vue-router
- vue-i18n
- VeeValidate
- vueuse
- 存储 useLocalStorage 等
- ref 的 各种undo,redo
- ====== State ======
- useActiveElement
- useDraggable
- useDropZone 可拖动到区域
- useElementBounding
- useElementSize width,height
- 元素可见性
- useMouseInElement
- useWindowScroll
- useWindowSize
- useTextareaAutosize 自动增高
- useTitle
- useUrlSearchParams url参数
- onClickOutside 元素外点击
- useFocus / useFocusWithin 元素是否激活
- ====== Elements ======
- useClipboard
- ColorMode 切换主题
- useEventListener
- useFileSystemAccess 文件信息
- useObjectUrl 查看文件内容
- useFullscreen
- useMediaControls 媒体内容
- usePermission 权限
- useWebNotification
- useWebWorker
- ====== Browser ======
- onKeyStroke 监听键盘
- onLongPress 长按时长
- useDevicesList 媒体设备
- useDisplayMedia 使用设备源
- useGeolocation 定位
- useInfiniteScroll 下拉滚动
- useKeyModifier 按键监听
- useMouse
- useNavigatorLanguage 语言
- useNetwork
- usePageLeave
- useSpeechRecognition 语音
- useTextSelection 选中文字
- ====== Sensors ======
- ====== Component ======
- useVirtualList 虚拟列表,高性能
- ======== 工具库 ========
- watchDeep 监听深度对象
- watchDebounced 防抖
- watchOnce 监听一次
- watchThrottled 节流
- useDebounceFn /useThrottleFn 防抖函数
- useEventBus 通知
- ====== watch ======
- useArrayDifference
- ====== Array ======
- useDateFormat 当前时间
- useTimeAgo 多久前
- ====== time ======
- useAsyncValidator 验证
- useChangeCase 单词切换
- useCookies
- useQRCode 二维码
- useSortable 拖拽排序
- ====== Integrations ======
- ====== 工具库 ======
- better-scroll 更好的无滚动条插件
- vue-infinite-scroll 下拉加载
- vue-infinite-loading 上拉刷新,功能强
- vue-lazyload 图片懒加载 -vue2.0
- Vue.Draggable 拖住div
- vue-fullpage
- form-generator 表单生成器[UI版]
- vue-form-making element-ui 可视化表单
- vue-cron Cron表达式组件
- vue-good-table 表单组件
- vxe-table
- skeletonreact 骨架屏
- ======== UI 库 ========
- vuex 状态管理
- 在多页面中使用
- 创建 store.js
- Pinia 状态管理
- pinia-plugin-persist-uni 适配 uni
- hello world 实例
- ======== 状态库 ========
- Nuxt 集成服务器渲染,ui框架等
- vue-element-admin
- ant-design
- d2-admin vue+ElementUI 后台框架
- vuetifyjs 37.4k
- 特性
- 别名
- 全局配置
- 字体图标
- i18n
- scss
- 主题
- 辅助类
- 组件
- v-spacer 空白弹框
- v-item-group
- v-hover 悬停事件
- v-list
- 指令
- v-ripple
- v-scroll
- ======== 框架 ========
- React
- 第三方库
- Shadcn UI 可定制UI 框架
- flowbite 基于 Tailwind UI
- ChatUI
- wasp 快速制作前后端
- motion.dev 动画库
- zustand 状态管理
- immer 优雅更新state对象
- lucide-react 图标库
- swr 请求库
- react-query 请求库
- date-fns 时间
- zod 验证
- react-hook-form
- react-hot-toast 通知9.9k
- React Flow 可视化流程节点
- 语法
- hook
- 自定义 hook
- useEffect
- useMemo 缓存计算结果
- useSyncExternalStore 获取外部数据
- useCallback
- useDeferredValue
- 组件
- StrictMode 严格模式
- Suspense 加载前的提示
- API
- 组合 vs 继承
- 状态提升
- 表单
- 列表 & Key
- 条件渲染
- 事件处理
- State
- 组件 & Props
- JSX
- Context 深层传递参数
- ref 更新不触发刷新
- Next.js
- Routing
- pages
- layout
- Routing
- Error Page
- Loading
- Link
- Parallel Routes
- Intercepting Routes 模弹窗路由
- layou 布局
- 环境变量
- API 路由
- Svelte
- 示例
- 编译为一个web Component
- Web Components
- 示例
- template 方式
- javascript 方式
- ====== 框架 ======
- 鸿蒙
- 安装
- 示例
- Hello World
- 目录说明
- resources 目录
- ArkTS 语言
- 组件
- 状态管理
- LocalStorage 页面级状态
- AppStorage 全局状态
- emitter 事件监听
- PersistentStorage 持久化
- Environment
- ASK UI 框架
- 布局
- 组件
- React Native
- 命令
- Codegen
- 常用库
- ignite 构建项目模版
- react-i18next 多语言
- react-devtools 调试
- date-fns 日期框架
- FlashList 高性能列表
- async-storage 持久化
- datetimepicker 时间选择器
- react-native-picker-select 原生弹窗选择器
- segmented-control tab 切换
- react-navigation 原生导航
- @react-navigation/bottom-tabs 底部导航栏
- @react-navigation/elements 标题栏
- react-native-doc-viewer 文档预览
- react-native-calendars 日历
- react-native-popup-menu 按钮菜单/底部菜单
- react-native-snap-carousel 切换图片
- react-native-keyboard-aware-scroll-view 输入框自动键盘滚动
- nativewind tailwind风格
- react-native-bottom-sheet 可拉动底部弹窗
- 鸿蒙
- 插件
- 鸿蒙官方插件
- 第三方库
- Electron 桌面应用
- 快速入门
- 技巧
- 内置模块
- app 模块
- BrowserWindow
- Menu 菜单
- globalShortcut (全局快捷键)
- Shell
- dialog 对话框
- tray 系统托盘
- webContents 渲染以及控制 web 页面
- ipcMain / ipcRenderer (进程间的通讯)
- clipboard 剪切板
- webview
- protocol 自定义协议
- desktopCapturer 获取其他软件信息
- 常用包
- electron-settings 设置管理器
- electron-log
- electron-builder 打包[推荐]
- electron-packager 打包
- electron-updater 升级
- electron-store 以文件形式缓存配置
- menubar 托盘菜单栏
- photon 桌面 UI 构建
- React Desktop macOS和Windows的UI工具包
- chrome-tabs
- xel 界面ui
- electron-util 常用包
- electronic-vue
- wails go实现的跨平台
- Runtime
- Events
- Log
- window 窗口
- Dialog 对话框
- Menu 菜单
- Browser 浏览器
- Clipboard 剪贴板
- Screen
- app 参数
- tauri 桌面开发
- 系统APi
- weex 跨平台vue 开发
- weex-ui 第三方 ui 库
- wexx-bindingx 动画效果
- wails go版pc端
- Taro 小程序
- 技巧
- 配置
- 路由
- 编译优化
- NutUI UI组件
- subPackages 分包
- 组件库
- CustomWrapper 用于动态更新
- PageContainer 半屏页面
- RootPortal 弹窗
- ScrollView 滚动
- Swiper/SwiperItem
- Vue
- 生成周期
- NutUI 基于vueUI库
- uniapp
- 插件 / 资源
- [通用] 更好的下拉刷新,上拉加载
- [app] 全量更新 app-简单
- [app] 可增量更新
- 登录/注册模板(含微信等第三方登录)
- 导航栏
- uni-form 表单校验
- combox 自动完成
- uni-data-checkbox
- uni-data-picker
- uni-loadmore 上拉加载更多
- uni-row 布局
- uni-dateformat 日期格式化,倒计时
- uni-file-picker 文件上传
- uni-search-bar 搜索栏
- uni-segmented-control 分段器
- UI 框架
- uni-框架
- ColorUI-UniApp
- uView UI 更多功能
- 快速入门
- 设计图尺寸
- 设置开发/生产模式
- 设置 scss 等样式
- 生命周期
- 组件/标签的变化
- template 与 block
- NPM支持
- 资源路径
- css 相关
- js 导出模块
- 使用 TypeScript
- 组件管理
- 事件处理器
- vuex
- 配置
- pages.json
- easycom
- package.json
- uni.scss
- App.vue
- main.js
- 生命周期
- 应用生命周期
- 页面生命周期
- 组件生命周期
- Vue
- 事件处理器
- 表单使用 v-model
- 组件的props
- 组件的ref
- 组件的.sync 子组件prop通知父组件
- 原生组件
- button
- page-meta
- navigation-bar
- custom-tab-bar
- open-data
- 运营服务
- 统一推送uniPush
- 运营统计
- 制作统一发行页面
- API
- 媒体
- uni.compressImage 压缩图片
- 设备
- 陀螺仪
- 系统信息
- 网络状态
- 罗盘
- 加速度计
- 拨打电话
- 扫码
- 剪贴板
- 屏幕亮度
- 手机振动
- 蓝牙
- 生物认证
- 键盘
- 界面
- 弹出菜单
- 设置导航条
- 设置 tabBar
- 背景/下拉背景
- 动画
- 滚动页面
- 网络字体
- 下拉刷新
- 节点信息
- 节点布局相交状态
- 文件
- 绘画
- 第三方服务
- 获取服务供应商
- 登录
- 检测是否登录
- 微信登录
- 信息获取
- 获取手机号
- 手机号一键登录
- 支付
- 推送
- 模板消息-小程序
- 授权
- 小程序设置界面
- 收货地址
- 打开其他小程序
- 模版消息
- 订阅消息
- 小程序更新
- App 更新
- 调试
- 统计 - uni 对程序的统计
- 广告
- 页面通讯 / 全局事件监听
- 公用模块 / 全局变量
- uni_modules
- datacom
- 自动化测试
- wexx / nvue
- HTML5+
- 国际化
- 微信小程序
- ====== 平台相关 ======
- webpack
- loader 插件
- babel-loader ES6 转为 ES5等
- html-loader
- css-loader
- postcss-loader 对 css 进行后处理
- less-loader
- url-loader 过小生成 base64位图片
- file-loader 引入图片
- image-webpack-loader 图片压缩
- 引入模块-并对模板赋值
- esbuild
- Api
- Build API
- 高级配置
- 语法
- gulpjs 构建工具
- 快速入门
- 语法
- 常用插件
- css 插件
- js 插件
- 图片 插件
- 自动刷新页面
- 示例
- 编译sass
- 监听 css变化
- 监听 文件变化,刷新页面
- 多页面示例
- 模版
- rollup 0配置打包脚本
- Rspack 基于Rust,兼容webpack
- lerna 管理包含多个软件包
- 命令
- 快速入门
- vite
- 功能
- 命令行
- vite
- 插件
- 兼容传统浏览器插件
- 示例
- 普通 html, 支持 import
- ====== 构建工具 ======
- npm
- npm 插件制作发布
- cnpm - 淘宝的 npm 镜像
- npx
- yarn
- 命令
- plugin
- .yarnrc.yml
- pnpm
- 命令选项
- Bower 浏览器管理插件
- ====== 包管理 ======
- SEO 优化
- ====== 性能与优化 ======
- vConsole
- 远程调试移动设备网页
- chil 远程调试网页
- 远程调试 Android 设备网页
- selenium 自动测试
- selenium IDE
- selenium Python
- 常用技巧
- 定位 元素 / 一组元素
- 控制浏览器操作
- WebDriver常用方法
- 鼠标事件
- 键盘事件
- 获取断言信息
- 设置元素等待 -等待某条件成立后在执行
- 多表单切换
- 多窗口切换
- 警告框处理
- 下拉框选择
- 文件上传
- cookie操作
- 调用JavaScript代码
- 窗口截图
- 关闭浏览器
- Chrome headless 无界面模式
- CukeTest 可测桌面应用
- 语法
- Tree 结构的选择
- 数据驱动测试用例
- 模型管理器
- 批量运行工具
- 常用工具函数
- Cucumber API
- this.attach 在执行后进行截图
- 每个场景后截图至报告
- 模拟桌面操作API
- 模拟 Ctrl+A
- 禁用中文输入法
- ====== 使用工具 ======
- 谷歌浏览器插件
- 概念
- manifest.json
- popup
- background
- content
- plasmo 浏览器插件框架
- 示例
- Popup
- options 选项页
- newtab 新标签
- background
- messaging 通信
- content
- Tab pages
- storage
- Env
- package 转 manifest
- Assets
- Icon
- lang
- 谷歌接口
- extension
- browserAction
- tabs
- contextMenus
- notifications
- omnibox
- 互相通信概览
- 长连接和短连接
- windows
- storage
- webRequest
- cookies
- runtime 插件相关
- manifest
- ====== 浏览器插件======
- chrome
- puppeteer js控制chrome
- DevTools protocol 通过websocket控制
- 命令行
- go 版本
- ====== chrome 控制 ======
- XPath
- ====== 文本生成图 ======
- plantuml
- mermaid.js
- 软件
- jetbrains / Intellij IDEA
- 常用插件
- Git Commit Message Helper
- Chinese (Simplified) 中文组件
- Php Inspections (EA Extended)
- redis simple -redis 客户端
- plantuml-integration uml 绘制
- 制作插件
- 连接远程docker
- 配置vagrant虚拟机
- 保存监听 eslint
- uni-app 代码提示
- docker 使用 phpstorm/php-71-apache-xdebug
- php 本地debug / 远程debug
- php 代码检测
- grumphp 限制 commit 提交
- vs code
- 常用插件
- C++ 配置
- Go 配置
- Qt 配置
- php 调试
- 同步设置
- 插件制作
- 单元测试
- i10n
- 发布插件
- 扩展工作台
- 数据储存
- package.json 清单
- visual studio
- 使用 Clang/LLVM
- 运行Qt
- 内网部署vs及插件
- 插件
- ReSharper C++
- Clang Power Tools
- Sublime Text配置
- github
- gource 通过 git 生成 动画
- thefuck 出现错误使用 fuck
- tldr 简化 man 函数
- postman
- Apache JMeter 并发测试工具
- Chrome
- 控制台
- Apche Directory Studio - LDAP软件
- sokit 端口监听 转发. socket 测试工具
- wireshark 抓包工具
- Ventoy 多系统合一启动盘制作工具
- UserLAnd 手机安装linux
- termux 手机安装 linux
- sharemouse 跨系统操作
- Microsoft Garage Mouse 多windows跨键盘
- syncthing 分布式同步
- D盾
- openArk
- dbeaver 跨平台数据库
- 搭建 shandowsocks
- google云 搭建
- 亚马逊云 搭建
- 终端走代理
- 一键 ss 脚本
- ⬇⬇⬇⬇⬇ 无界面软件 ⬇⬇⬇⬇⬇⬇
- sqlmap 防sql 注入的测试
- scrcpy 手机投屏
- sftpgo 跨平台 ftp
- frp 内网穿透
- AWS 亚马逊
- 小米路由AX3600
- upx 压缩可执行文件
- firebase 赛博菩萨软件
- 安卓
- adb
- emulator 虚拟器
- 安卓抓包
- MAC
- php 环境配置 2.0版
- pear / pecl 安装
- Mac 配置 Python 和Python3
- 配置 Oh My Zsh+ iTerm2
- iTerm2 自动登陆 ssh
- 配置 Vim
- brew
- 创建 brew 包
- MAME 街机模拟器
- php-osx mac 安装php
- 破解 wifi
- iOS注册美区Apple ID教程
- Window
- 常见问题
- 打不开微软商店
- cmd 命令
- cmd 运用场景
- 复制目录
- 删除目录下的所有文件
- < 交互时可自动输入
- 查看端口占用的pid
- 当前目录管理员身份运行
- 批处理命令
- echo / rem 注释
- pause 暂停
- call 调用其他 bat
- goto
- set 设置变量
- 获取命令行参数
- 常用命令
- tasklist 查看进程
- taskkill 进程操作
- ipconfig
- nslookup 域名解析
- netstat
- route 路由信息
- arp 查看ip使用情况
- findstr
- robocopy
- SpaceSniffer 检查磁盘文件暂用大小
- choco win包管理神器
- 创建 choco 包
- 实例
- nupkg 常用函数
- WSL 2 -方便win docker
- Sysinternals 微软工具箱
- Autologon 免密登录
- Psexec 远程执行工具
- Autoruns 查看启动项
- AdExplorer / AdInsight AD与LDAP查看器
- BgInfo 电脑信息生成到桌面
- LogonSessions 列出登录时间
- PsInfo 系统信息
- PsKill 终止(本地或远程)进程
- PsPing Tcp ping
- PsLoggedOn 显示登录的用户
- PsPasswd 更改本地或远程的密码
- PsShutdown 关闭或重启(本地或远程)电脑
- RDCMan 批量管理远程
- TcpView 列出套接字
- ZoomIt 屏幕缩放
- scoop 包管理器
- 添加ftp 服务
- vcpkg c++包管理器
- 升级 TLS
- clumsy 模拟不稳定网络环境
- Dependencies 查看 exe 依赖的dll
- portableapps 软件装U盘
- mobaXterm 类Xshell
- mouse without borders 共享键鼠
- IIS
- dumpbin 类似 linux 的 ldd
- geek 卸载工具
- 配置内外网双网卡
- YY-Thunks 现代应用兼容低版本
- Win11Debloat win11移除无用软件
- CFF Explorer
- Linux
- 知识碎片
- profile 与 bashrc
- /etc/init.d/functions 公共函数
- 实例
- &>file、2>&1、1>&2、/dev/null
- 管道和重定向
- 守护进程脚本
- 几个重要的信号
- cli a-z 常用命令注解
- 选项优先级
- 使用场景
- 创建用户,给root权限
- 设置服务器时间
- [自制] 批量操作多节点的脚本
- 引用环境变量替换文字模版
- umount 挂载硬盘
- 内核版本/系统版本信息
- 设置静态 IP
- 常用命令
- 文本 / 文件 / 目录
- egrep = grep -E 查看文件内容
- grep 查看文件内容
- awk 对文本每行处理
- sed 处理文本文件
- xargs 多行转换
- find 文件查找
- locate 比find 更快的索引
- wc 统计文字
- tr 替换与清除
- cut 按列切分
- tee
- 守护进程
- systemd 定时器
- systemctl 守护进程
- systemctl
- Unit.server 配置
- 实例
- 讲解 sshd 配置
- 实例 配置 go-web
- Type=forking 的使用
- journalctl 日志管理
- systemd-analyze 启动耗时
- hostnamectl 主机信息
- localectl 查看本地化设置
- timedatectl 查看当前时区设置
- loginctl 查看用户信息
- goreman 服务管理 [神器][golang]
- supervisor [python]
- supervisord [golang][带GUI]
- chkconfig 开启启动管理
- 标准 init.d 模版
- httpd 开启启动
- 调试工具
- strace 调试脚本
- pstack 跟踪进程栈
- perf 性能分析工具
- stress 压力测试
- ab 压测工具
- ldd 查看执行文件的依赖
- readelf 动态库的真实版本
- patchelf 强制指定LB_LIBRARY_PATH
- tcpdump
- gdb 调试利器
- lsof 查看当前系统文件
- ss 网络端口查询
- free 内存情况
- iotop 查看进程 IO
- iftop 网络 IO 监控
- tc 模拟弱网
- 运维工具
- ansible 批量执行多服务器
- awx UI管理工具
- expect - 自动交互脚本
- envsubst 替换模版中的环境变量
- top / uptime
- sshpass 非交互密码登录
- bash-completion 命令补全
- 查看硬件信息
- lscpu 显示cpu型号
- arch 查看架构
- uname 查看系统版本
- cat /proc/meminfo 查看内存信息
- lsb_release 系统信息
- arch cpu架构
- ulimit
- 网络工具
- nmcli 配置静态网络
- nmap 端口扫描
- 磁盘管理
- df 磁盘使用情况
- du 统计文件占用
- 管理用户/组
- useradd
- usermod
- userdel
- groups 查看
- groupadd
- groupmod
- groupdel
- passwd
- openssh
- ssh openssh-client包
- 客户端配置文件
- sshd openssh-server包
- openssl 使用 openssl 包
- 实例
- 服务器证书 .key 与 .pem
- 客户端证书
- 同时生成服务端与客户端证书
- 登录方式
- ssh-keygen 秘钥登录
- ssh-agent / ssh-add 秘钥记住密码
- 证书登录
- 端口转发
- scp
- rsync 增量同步
- sftp
- gcc
- 静态库
- 动态库(共享库)
- 安全
- firewall-cmd 防火墙
- iptables
- asd 内存硬盘
- ln
- tar
- diff
- watch
- patch
- Curl
- wget
- Vim
- Tmux
- NFS 文件共享
- ftp
- logrotate linux 日志切割
- NFS 网络文件
- manpages-zh 中文man
- Bash 脚本
- 快速入门
- 知识点
- $()与反引号区别
- 检查返回值
- !$ / !*
- shell替换上一条命名的变量
- bash 最简单 kv 数据库
- echo / printf / 快捷键
- Bash 的模式扩展
- 引号和转义
- 变量
- 常见变量
- 字符串操作
- 算术运算
- 参数
- getopts Bash内置
- getopt 基本也自带
- env / shift / exit
- read 用户输入值
- 条件判断
- select 菜单选择
- 循环
- 数组循环
- 花括号迭代
- seq 设置起始增量
- 函数
- 数组
- set 命令
- 脚本调用堆栈
- mktemp 命令,trap 命令
- Bash 启动环境
- 命令提示符
- 颜色
- 第三方脚本
- trash.sh 删除进回车站
- centos 7
- 安装 gui
- yum
- 切换 yum 源
- 建立 yum 仓库
- rpm
- .src.rpm 包含源码的rpm包
- rpm2cpio 只获取 rpm 包内文件
- rpmbuild 制作 rpm 包
- rpmbuid 命令
- 布局说明
- 变量说明
- macros rpmbuild 宏文件
- Group 分组
- 实例
- 通用模版
- nginx 实例
- 注册为 systemctl 服务
- 一个同时匹配 rpm 与deb 的脚本
- 支持 jenkins
- ubuntu
- 安装图形化
- 美化界面
- apt
- dpkg
- 制作 deb 包
- UOS
- 数据库
- 知识
- CTE 创建SQL变量
- 自联结
- 临时函数
- over 窗口函数
- mysql / sqlServer / oracle 共性
- 创建一个大量表的sql
- 开源库
- readyset 自动缓存
- ODBC
- Centos 安裝 ODBC
- Windows 安装 ODBC
- Mysql / MariaDB
- 安装
- windows
- linux 编译安装
- 精简大小
- mariadb-win-my.ini 配置文件
- 场景
- 数据库远程登录
- 打印全部日志
- 开启慢查询
- 清除/关闭 查询缓存
- 查看 cpu 占用过高
- 取消严格模式
- 修改/忘记 密码
- 主从复制
- 服务无法启动
- mysql 分区
- 备份还原
- 基于 时间/位置 恢复
- 完整的 mysqldump 备份与恢复示例
- crontab定时备份脚本
- 新账号设置只读权限
- 技巧
- 查看性能情况
- sql 技巧
- my.cnf 文件读取优先级
- conf 文件优先级
- MySQL 函数
- 运算符
- 字符串函数
- 数字函数
- 日期函数
- 高级函数
- 可执行命令
- Mariabackup 热备份工具
- mysqlslap 性能测试工具
- mysqladmin
- mysqlcheck 修复/优化/分析表
- mysqld_safe
- mysqldump
- mysqlbinlog 操作记录
- 第三方库
- soar sql检查
- soar-web web-ui 版本
- vitess 集群化
- 字段类型说明
- kingshard mysql 代理选择使用主或从执行 sql
- PostgreSQL
- 安装
- 场景
- 问题
- 重置密码
- 批量mock数据
- 命令行
- psql
- pg_dump / pg_dumpall
- pg_restore
- pgbench
- createuser 创建用户
- 技巧
- USING 关联表
- 查看表结构
- 物化视图(读多写少缓存)
- Notify-Listen
- 高性能
- 语法
- 数据类型
- 数值类型
- 数组类型
- JSON 类型
- HSTORE 键值对存储
- 枚举类型
- 组合类型
- 范围类型
- tsvector 文本搜索类型
- 函数和操作符
- php 原生中文分词
- 外部数据源
- mysql 数据源
- mongo数据源
- 文件源监控
- redis_fdw
- file_fdw
- 增删改查
- 表操作
- 模式操作
- 表继承
- WITH 查询
- 树结构表
- 分表
- CHECK 检查约束
- 域类型
- 图数据库
- 索引类型
- 数据库操作
- EXPLAIN
- 高可用
- 插件
- pglogical 订阅发布-逻辑复制
- 订阅发布
- PostGIS 几何空间,地理
- TimescaleDB 时序
- pg_stat_statements
- pgcrypto
- pg_trgm 索引前后模糊查找
- Citus 水平扩展
- uuid-ossp
- pg_jieba 中文分词
- pgpool-II 主从和负债均衡和缓存
- 三方库
- postgrest
- 配置文件
- RESET API 参数
- 客户端封装请求
- preset go实现
- pgx go驱动
- ParadeDB 可媲美 Elasticsearch
- pg_partman 自动分区
- pg_cron定时任务
- Pigsty 运维和监控
- Oracle
- pkg-config 安装
- SQL Server
- sqlite
- 语法
- 数据类型
- 扩展
- FTS5 全文索引
- 内存数据库
- JSON 处理
- R-Tree 地理位置
- sqlite-vec 向量数据库
- WebAssembly 版
- 库
- 示例
- rqlited 分布式sqlite
- ==== 关系型数据库 ====
- TiDB mysql 协议 可分布式
- CockroachDB postgresql 协议
- go-实例
- FerretDB -MongoDB协议,go 实现
- ==== golang 实现====
- MemSQL
- 示例
- go
- VoltDB
- 示例
- golang
- ==== 内存关系型数据库 ====
- 金仓数据库 仿Pgsql
- 安装
- 技巧
- 配置 odbc
- 问题
- SQL 语法
- 调用
- goalng 调用
- php 调用
- 达梦数据库 仿oracle
- sql 语法
- php 注意事项
- pdo thinkphp6 迁移工具适配器
- OceanBase 阿里
- ==== 国产化数据库 ====
- clickhouse
- Hbase
- ==== 列数据库 ====
- MongoDB
- 技巧
- 打开慢查询
- 场景
- 删除对象数组中的某条记录
- 用户认证
- 索引 设置过期索引 / 全文检索
- 自增id
- 数据库/表操作
- 原子操作
- 固定集合 | 用于存放日志
- 多表关系
- 分片(分布式集群)
- 3.x 版本
- 4.2 版本 [ 4.0集群切片增加不会转义数据 ]
- 搭建集群
- 删除切片
- 设置 Balancer 运行时间
- 以文件方式启动,推荐配置
- mongo分片集群添加登录认证
- 数据备份
- GridFS 文件存储
- golang 操作 mongo
- MapReduce 统计
- Redis
- 字符串 / 列表 / Hash / Set / Zet / 基数统计算法
- 队列 /订阅发布 php实例
- 事务 / bitmap 位图 / 地理位置
- 管道 / 分布式锁
- 备份与恢复 / 性能测试
- 设置密码 / 模糊查询
- 性能优化
- 监听过期 key
- docker 集群
- php 连接集群
- 单机测试集群 (官方一键安装)
- 生成环境 官方集群
- Codis 分布式 Redis 解决方案
- 主从模式 / 哨兵模式
- Memcached
- LevelDB kv 存储 google开源
- golang 示例
- dragonfly 内存型,兼容Redis与Memcached
- RethinkDB
- ==== 非关系型数据库 ====
- influxdb 数据库(用于日志存储)
- ==== 时序数据库 ====
- neo4j
- 安装
- Cypher查询语言
- 示例
- go
- ==== 图形数据库 ====
- zincsearch 轻量级全文搜索引擎 [go实现]
- 索引
- 数据
- 搜索
- Elasticsearch 全文搜索引擎
- index(索引)操作
- type(表)操作
- ElasticHD 可视化 docke 安装
- elasticsearch-head 可视化
- 集群部署
- 支持 php
- 增删改查
- 封装成 mdel
- gofound- go 实现的全文索引
- sphinx
- 示例
- 快速入门
- ==== 轻量级全文搜索引擎 ====
- undb 网页数据-带RESTAPI
- 消息队列
- RabbitMQ
- Direct 直发模式 php 版
- Fanout 分发模式 php 版
- Topic 模糊模式 php 版
- Zeromq
- go-zmq4 使用教程
- NSQ [2.7k] go实现的,部署简单
- nats
- Kafka
- 分布式对象存储
- minio
- 将MySQL / MongoDB 等 备份存储到MinIO Server
- 通过 nginx 代理 调用 monio
- hadoop
- 伪分布式版
- 集群版
- go 调用
- Hadoop Shell命令
- WebHDFS REST API (使用curl)
- JuiceFS
- 安装
- 示例
- SQLite 和阿里云 OSS 对象
- 服务发现
- Consul [21.9K]
- 安装
- etcd [35.6k]
- 命令
- etcdctl
- 示例
- go 操作 etcd
- go 服务发现实现
- 搭建etcd集群
- 搭建单机集群
- 架构设计
- 软件架构
- DDD分层
- Go示例
- 分层架构
- 事件驱动架构
- 微核架构(插件架构)
- 微服务架构
- 微服务三剑客
- 熔断
- 限流
- 负载均衡
- API 网关
- 云架构 - 最容易扩展的架构
- 数据库设计
- dept_code 具有层级关系的子层级
- 数据库规范
- slq 优化
- 索引失效的场景
- 认证
- 开放平台认证
- 双因素认证
- APP 的 token 认证
- JWT - JSON Web Token 验证
- OAuth 2.0
- HTTP 接口设计
- 签名设计
- Go 签名验证
- PHP 签名验证
- 幂等性设计
- 接口限流
- 原子计数器
- 漏桶算法
- 令牌桶算法-常用
- 网关层限流
- RPC
- json-rpc_2.0 规范
- HTTPS 升级指南
- 快速入门
- Let's Encrypt 免费证书
- RESTful 规范
- 设计API
- 常用状态码
- 缓存
- 压缩
- 安全
- API版本控制
- 内容协商
- application/vnd.api+json 响应格式(太啰嗦,不推荐)
- JAX-RS 2.0 [Java API]
- API文档
- apidoc [8.6k]生成文档
- showdoc [7.8k]技术文档、API 文档
- swagger
- OpenAPI
- go-swagger
- meta
- route
- parameters
- response
- model
- 示例
- swag go的实现
- hello world
- gin 集成
- 文档/手册
- docsify 运行时解析
- dumi 为组件开发
- starlight astro
- yaml / toml 等配置文件
- yaml 配置文件用法
- toml
- 持续集成
- 概念
- Jenkins 和 Gitlab 交互
- README 规范
- 徽章
- 代理
- Connect 代理
- 分布式系统
- 分布式 ID 生成器
- 雪花算法
- UUID
- NanoID
- 分布式锁
- 延时(定时)任务系统
- 分布式搜索引擎
- 负载均衡
- 分布式配置管理
- 分布式爬虫
- 分布式事务管理器
- 加密
- PGP
- GPG 命令
- 示例
- 生成 pgp 证书
- golang 示例
- monorepos 多子模块管理
- 相关工具
- 管理最佳实践
- 发布方式
- 服务器分批
- 业务分批
- 通用代码技巧
- 日志平台设计
- ELK 组合
- PaaS架构教程
- 邮箱协议
- 软件开发模式
- 敏捷开发
- 自动生成更新日志
- git-chglog 2.7k
- git-cliff 9.1k
- 设计决策原因 ADRs
- 概念
- 系统
- 进程
- Poll 与 Epoll
- 文件描述符
- 管道符
- 进程与线程的区别
- 进程状态
- 死锁 / 活锁
- 文件锁
- 孤儿进程 / 僵尸进程
- 进程间通信
- 共享内存
- Cgroups 资源隔离-docker基础
- Namespaces 资源隔离
- 内存堆栈
- POSIX
- umask 文件创建掩码
- sendfile 优化文件传输
- 加密
- 证书相关(如:ssl,pem 等)
- 网络
- HTTP
- 状态码
- 请求方法
- 响应头信息
- http缓存相关
- IP / 子网掩码 / 网关
- 大端序/小端序
- cookie-http-only
- 静态网站
- hugo 48.4K 静态网页
- hexo 31.7K 创建博客
- 开源协议说明
- 正则
- IP 说明
- 0.0.0.0
- 255.255.255.255 广播
- 127.0.0.1
- 224.0.0.1 组播(多播)
- golang 示例
- 169.254.x.x
- 私有地址
- 视频课程
- go 微服务抢红包
- 计算机组成原理+操作系统+计算机网络
- 计算机组成
- 计算机总线
- 存储器
- 高速缓存
- 计算机的指令系统
- 计算机的控制器
- 计算机的运算器
- 计算机指令的执行过程
- 进制运算
- 三种编码方式 原码 / 补码 / 反码
- 定点数 / 浮点数
- 浮点数的运算
- 操作系统
- 进程
- 进程实体
- 五状态模型
- 进程同步
- 线程同步
- Linux的进程管理
- 进程调度
- 死锁
- 存储管理
- 内存分配与回收
- 页式存储管理
- 虚拟内存
- Linux的内存管理
- 页内碎片与页外碎片
- Budy内存管理算法
- Linux交换空间
- 文件管理
- 文件的逻辑结构
- 辅存的存储空间分配
- 文件系统
- 文件系统分类
- EXT文件系统
- 设备管理
- 广义的O设备
- lO设备的缓冲区
- SPOOLing技术
- 线程同步
- 互斥量(锁)
- 自旋锁
- 读写锁
- 条件变量
- 线程同步
- fork 创建进程
- Unix域套接字
- 计算机网络
- ISP
- OSI 七层模型
- 网络拓扑
- 网络层 IP
- IP
- 传输层 UDP/TCP
- UDP
- TCP
- 可靠传输
- 流量控制
- 拥塞控制
- 三次握手
- 四次挥手
- 应用层
- DNS 域名解析
- DHCP 协议
- HTTP 协议
- 编译原理/操作系统/图形学
- 一.计算机
- 汇编
- 中断和中断向量
- 三.编译原理
- 编译器和解释器
- 编译流程
- 四.词法
- 流
- 词法
- 用状态机提取词语(lexer)
- 完整的词法分析器-多状态机合并
- 五.抽象语法树
- 抽象语法树的继承 (parser)
- 递归法求抽象语法树
- 表达式树的验证
- 块和语句
- 六.三地址代码
- 基于 SDD 的翻译
- 词法作用域与符号表
- 符号表
- 三地址表示
- 翻译的整体过程和表达式
- 七. 创建虚拟机
- 用虚拟机执行程序
- 将三地址代码转为指令
- 八.操作系统
- 内核
- 九.程序
- 抽象-进程
- 线程
- 竞争条件和临界区
- 信号量与互斥量
- 十.调度
- 调度
- 优先队列
- 十一.内存
- 分层存储
- 垃圾回收
- 地址空间
- 虚拟内存,页面,MMU
- 程序对内存的管理
- 垃圾回收
- 引用计数
- 标记,扫地,整理
- 分代算法
- 十二.文件系统
- 文件系统和磁盘
- 文件
- 共享文件和目录
- VFS和基于日志的文件系统
- epoll与select
- 十三.图形学
- 向量
- 向量的叉积与点积
- 圆的世界
- 矩阵运算
- 三角形网络
- 渲染图形
- 十四.WebGL
- 绘制2D图形
- GLSL
- 图形渲染管道
- 球面的坐标
- Go微服务入门到容器化实践,落地可观测的微服务电商项目
- 第一章 学习指南
- 第二章 微服务与DDD
- 第四章 注册配置中心实现
- 第六章 熔断/限流/负载均衡
- 熔断
- 安装 Hystrix Dashboard
- 限流
- 负载均衡
- 书籍
- linux鸟哥的私房菜
- 目录
- 数据结构和算法(Golang实现)
- 递归和尾递归
- 算法复杂度及渐进符号
- 链表
- 字典
- 树
- 分治法应用
- 快速排序
- 归并排序
- 排序算法
- 冒泡排序 最差,不推荐
- 选择排序
- 插入排序
- 希尔排序
- 归并排序
- 优先队列及堆排序
- 快速排序
- 查找算法
- 哈希表:散列查找
- 二叉查找树
- AVL树 比二叉树低的树
- 2-3树和左倾红黑树
- 2-3-4树和普通红黑树
- labuladong的算法小抄
- 第零章、必读系列
- 学习算法和刷题的框架思维
- 动态规划解题套路框架
- 回溯算法解题套路框架
- BFS 算法解题套路框架
- 二分搜索
- 滑动窗口算法
- 股票买卖问题
- 常见知识
- 搜索引擎背后的经典数据结构和算法
- 架构师之路
- 消息系统
- QQ状态同步究竟是推还是拉
- 在线消息可靠传递
- 分布式ID生成方法
- 负载均衡
- 数据库与缓存
- 数据库软件架构
- 高并并发下 - 为表新增字段
- 数据库垂直拆分
- 数据平滑数据迁移
- 数据库秒级平滑扩容
- 计数系统架构实践
- 应用层/安全层/传输层协议选型
- MQ 消息队列
- 到底什么时候该使用MQ
- 实现延迟消息
- 实现消息必达
- 定时任务触发(如用户离线判断)
- 超高并发的无锁缓存
- 连接池实现
- TCP/IP 详情卷一
- IP:网际协议
- Ping 程序
- UDP 用户数据报协议
- TCP的超时与重传
- Go 语言圣经
- 入门
- 锁的原理
- 互斥锁
- Goroutines和线程
- 小团队构建大网站:中小研发团队架构实践
- 企业中体架构
- 消息中间键 RabbitMQ
- Redis
- 任务调度Job
- 应用监控系统 Metrics
- 集中式日志ELK
- 搜索服务Solr
- 分布式协调器 ZooKeeper
- Jenkins 自动构建
- 单点登录
- 企业支付网关
- 研发团队文化是怎么“长”出来的
- HTDP 程序设计方法
- 第二章 数、表达式和简单程序
- 第七章 数据混合与区分
- 第九章 复合数据类型
- 第十章 表的进一步处理
- 第十一章 处理任意大的自然数
- 第十二章 三论符合函数
- 第十三章 用 list 构造表
- 第十四章 再论自引用数据的定义
- 第十六章 反复精化设计
- 第十七章 处理两种复杂数据
- 第十八章局部定义和词汇的范围
- 代码大全
- 第三章 三思而后行:前期准备
- 架构的典型组成部分
- 花费在前期准备上的时间长度
- 第五章 软件构造中的设计
- 理想的设计特征
- 设计的层次
- 常见设计模式
- 第六章 可以工作的类
- 好的抽象
- 良好的类接口
- 有关设计和实现的问题
- 构造函数
- 第七章 高质量的子程序
- 好的子程序名
- 如何使用子程序参数
- 宏子程序和内联子程序
- 第十章 使用变量的一般事项
- 持续性
- 绑定时间
- 第十一章 变量名的力量
- 选择好变量名的注意事项
- 为特定类型的数据命名
- 非正式命名规则
- 第十二章基本的数据类型
- 字符和字符串
- 布尔
- 枚举
- 第十三章 不常见的数据类型
- 结构体
- 指针 [推荐反复查看]
- 第十五章 使用条件语句
- 第十六章 控制控制
- goto
- 第十七章 不常见的控制结构
- 递归
- 第十八章 表驱动法
- 直接访问表
- 索引表访问
- 阶梯访问表
- 第十九章 一般控制问题
- 减少嵌套层次
- 复杂度的重要性
- 第二十二章 开发者测试
- 第二十四章 重构
- 重构的理由
- 特定的重构
- 语句级的重构
- 子程序级重构
- 类实现的重构
- 类接口的重构
- 系统级重构
- 安全的重构
- 第26章 代码调整方式
- 循环
- 表达式
- 将子程
- 变得越多,事情反而没变
- 计算机程序的构造和解释(SICP)
- 第一章 构造过程抽象
- 1.1 程序设计的基本元素
- 1.3 用高阶函数做抽象
- 函数式编程指北
- 第二章 一等公民的函数
- 第三章 纯函数的好处
- 第四章 柯里化(curry)
- 第五章 代码组合(compose)
- 范畴学
- 习题
- 第六章 示例应用
- 声明式代码
- 实例项目:获取图片
- 第七章 Hindley-Milner 类型签名
- 第八章 特百惠
- functor / Maybe
- 纯错误处理
- 包裹函数 - IO
- 异步任务
- 练习
- 第九章 Monad
- pointed functor
- chain
- 练习
- Applicative Functor
- 设计数据密集型应用
- 第一章 可靠性,可扩展性,可维护性
- 第二章 数据模型与查询语言
- 第三章 数据与索引
- 第四章 编码与演化
- 第五章 复制
- 第六章 分区
- 第七章 事务
- 第八章 分布式系统的麻烦
- 第九章 一致性与共识
- Unix 编程艺术
- 一.哲学
- 十一:最小立异原则
- 十二.优化
- 十三:复杂度
- 十九:开放源码:在Uniⅸ新社区 中编程
- 设计模式
- 创建型模式
- 简单工厂方法模式
- php 示例
- go 示例
- 抽象工厂模式
- php 示例
- go 示例
- 生成器模式
- php 示例
- go 示例
- 原型模式 - 克隆
- php 示例
- go 示例
- 单例模式
- php 示例
- go 示例
- 结构型模式
- 适配器模式
- php 示例
- go 示例
- 桥接模式 [❤❤]
- php 示例
- go 示例
- 组合模式
- php 示例
- go 示例
- 装饰模式 - 钩子 [❤❤❤]
- php 示例
- go 示例
- 外观模式
- php 示例
- go 示例
- 享元模式
- go 示例
- 代理模式 [❤❤❤]
- php 示例
- go 示例
- 行为模式
- 责任链模式[❤❤❤]
- php 示例
- go 示例
- 命令模式
- php 示例
- go 示例
- 迭代器模式
- php 示例
- go 示例
- 中介者模式
- php 示例
- go 示例
- 备忘录模式
- php 示例
- go 示例
- 观察者(发布订阅)模式[❤❤❤]
- php 示例
- go 示例
- 状态模式 - 状态机
- php 示例
- go 示例
- 策略模式[❤❤❤]
- php 示例
- go 示例
- 模板方法[❤❤❤]
- php 示例
- go 示例
- 访问者模式
- php 示例
- go 示例
- 数据结构
- 数组
- 双指针
- 字符串
- 找子串
- 栈 / 队列
- 循环队列
- 列表 List
- 排序算法
- 链表
- 遍历
- 翻转链表
- 树
- 二叉树
- 二叉树遍历
- DFS 深度优先
- BFS 广度优先
- 示例
- 二叉树的最大深度
- 对称二叉树
- 将有序数组转换为二叉搜索树
- 算法
- 查找算法
- KMP 算法
- 跳表
- Sunday算法
- 动态规划
- 爬楼梯
- 最大子序和
- 零钱问题
- 分布式算法
- Raft
- hashicorp/raft go 实现
- 贝叶斯算法
- python 示例
- 人工智能
- 知识
- 基础概念与入门案例
- 语言模型
- 注意力机制
- Transformers pipelines
- 提示词工程
- 开源项目
- DiffBIR 图片项目
- TokenFlow 视频语言渲染
- ProPainter 去除视频人物
- CodeFormer 图片画质增强
- yolov5 物品识别
- 训练自己的模型
- Donut 无需OCR识别图片内容
- ott 翻译
- VideoPipe 视频物品识别
- ollama
- LlamaIndex 链接外部数据与大模型
- 示例
- PyTorch
- 安装
- TensorFlow
- LangChain
- langchaingo
- MCP Gateway 普通 api转 mcp
- void 开源ai编译器
- autogen 多代理合作
- 大语言模型架构
- Awesome
- JittorLLMs
- huggingface
- transformers
- pipeline 的处理流程
- 离线模式
- 模型处理
- 示例
- 常用 pipelines
- 使用gpt2
- 翻译
- Q&A
- mcp
- Context7
- claude-task-master
- 汇编
- MIPS
- 指令集
- 加载/保存 指令集
- 算术指令集
- 控制流 指令集
- SS, SP, BP 三个寄存器
- 音视频
- 知识
- 几种浏览器播放RTSP视频流解决方案
- 流媒体播放格式
- 流媒体传输协议(rtp/rtcp/rtsp/rtmp/)
- 常用工具/库
- EasyDarwin
- EasyDarwin RTSP流媒体服务器-GO
- EasyPusher
- EasyDSS 非开源 RTMP
- EasyScreenLive 录制推流
- ZLMediaKit 流媒体服务框架 c++
- 基于ZLMediaKit的UI
- lal 流媒体服务器 GOLANG
- go2rtc 支持各种流媒体协议
- RTP/RTCP
- RTP
- RTCP
- RTSP
- 知识
- RTSP/RTP 交错传输方式
- RTP timestamp
- rtsp组播
- 语法
- OPTIONS 询问
- DESCRIBE 询问SDP
- SETUP 设置传输模式
- PLAY 启动
- PAUSE 暂停
- TEARDOWN 终止
- SET_PARAMETER 生成一个I帧
- GET_PARAMETER 查询参数状态
- RTSP 响应状态码
- 示例
- ffmpeg 推流到rtsp服务器基于udp
- ffplay 拉取rtsp流,基于udp
- ============
- ffmpeg 推流到rtsp服务器基于tcp
- ffplay 拉取基于TCP的rtsp流
- ===========
- EasyScreenLive 推送rtsp服务器 基于tcp
- RTMP
- 术语
- 消息和块的区别
- 协议流程
- 分块
- RTMP消息格式
- RTMP消息类型
- 视频协议
- H.264
- STUN / TURN
- MCU合流
- SDP协议
- SIP
- 软考
- 计算机组成与体系结构
- 现代计算机基础
- 计算机网络
- 信息安全技术
- 软件工程
- 软件工程概述
- UML
- 设计模式
- 软件系统建模
- 基于构件的软件工程
- 测试
- 逆向工程
- 系统架构设计
- 体系结构风格
- 数据流风格
- 调用/返回体
- 仓库体系风格
- 事件驱动风格
- 面向服务风格
- 分布式风格
- 4+1视图和UML 5种视图
- 面向服务
- 微服务
- 分布式
- 信息化与信息系统
- 云原生
- 软件可靠性
- 嵌入式
- 操作系统
- 数据库系统
- 主从复制
- Redis
- 图数据库
- 软件维护
- 管理与战略经济
- 知识产权
- 软件架构演化和维护
- 大数据架构
- Lambda架构
- Kappa架构
- 系统质量属性与软件评估
- 未来信息综合技术
- 数字孪生
- 人工智能
- 论文
- 2024,2025论文题目
- 分布式事务-
- 论高可靠性系统中软件容错技术的应用
- 软件架构评估--
- 论基于构件的软件开发
- 论多源异构 -
- 论软件维护
- 论软件维护方法及其应用 -
- 论结构化分析方法
- 论面向对象分析
- 论微服务架构
- 云原生
- 论企业集成平台
- 论面向服务架构
- 论基于架构的软件设计方法及应用 -
- 论软件架构风格
- 论层次架构设计理论与实践
- 论数据访问层设计技术及其应用
- 论软件架构的演化