## PV小皮带
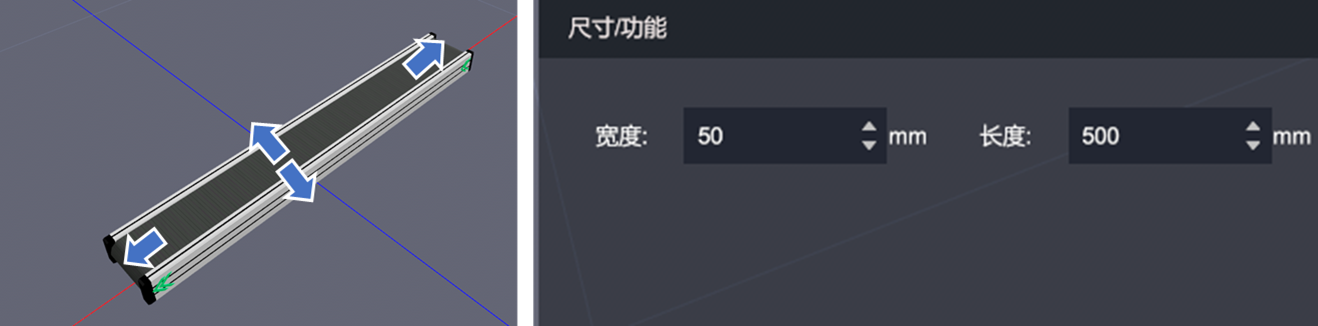
**参数尺寸:**
> 宽度为50~600mm,长度为100~9999mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
## PV大皮带

**参数尺寸:**
> 宽度为500~1000mm,长度为1000~3000mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
## PV双皮带
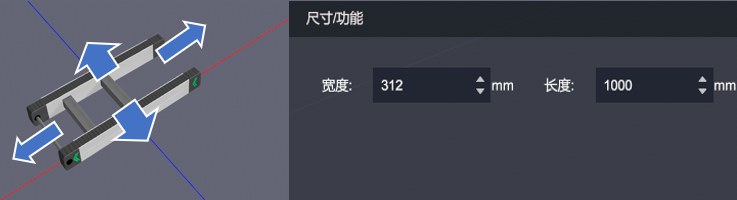
**参数尺寸:**
> 宽度为300~800mm,长度为1000~3000mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
## 完美传输带

**参数尺寸:**
> 宽度为100~300mm,长度为500~2000mm,高度为10~15mm,透明度为0~100%
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
## GT滚筒
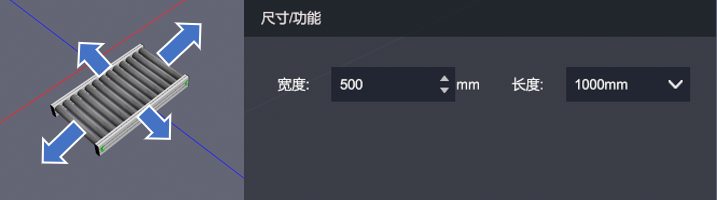
**参数尺寸:**
> 宽度为500~1000mm,长度为1000~3000mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
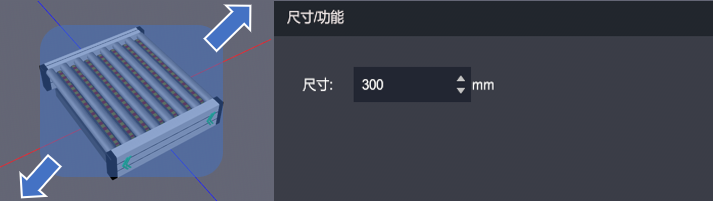
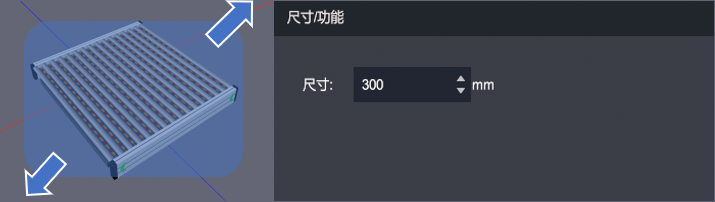
## 十字转向-300
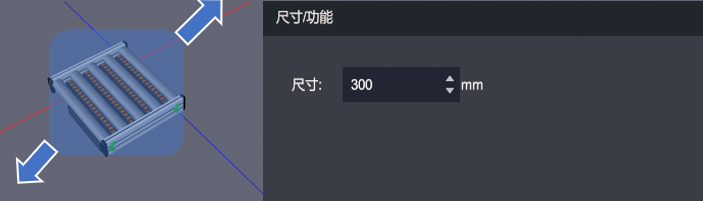
**参数尺寸:**
>尺寸为300~500mm(整体呈比例增大缩小)
**控制接口:**
> * X使能:DO接口,打开后X方向传输带开始转动;
> * X方向:DO接口,打开后传输带向X反方向运动;
> * X速度控制:F32输出接口,控制X方向传输带速度,为0~10,传输带运行速度设置;
> * Y气缸使能:F32输出接口,打开后Y轴运输带被抬起;
> * Y使能:DO接口,打开后Y方向传输带开始转动;
> * Y方向:DO接口,打开后传输带向Y反方向运动;
> * Y速度控制:F32输出接口,控制Y方向传输带速度,为0~10,传输带运行速度设置;
## 十字转向-500
**参数尺寸:**
>尺寸为500~1000mm(整体呈比例增大缩小)
**控制接口:**
> * X使能:DO接口,打开后X方向传输带开始转动;
> * X方向:DO接口,打开后传输带向X反方向运动;
> * X速度控制:F32输出接口,控制X方向传输带速度,为0~10,传输带运行速度设置;
> * Y气缸使能:F32输出接口,打开后Y轴运输带被抬起;
> * Y使能:DO接口,打开后Y方向传输带开始转动;
> * Y方向:DO接口,打开后传输带向Y反方向运动;
> * Y速度控制:F32输出接口,控制Y方向传输带速度,为0~10,传输带运行速度设置;
## 十字转向-1000
**参数尺寸:**
>尺寸为1000~1500mm(整体呈比例增大缩小)
**控制接口:**
> * X使能:DO接口,打开后X方向传输带开始转动;
> * X方向:DO接口,打开后传输带向X反方向运动;
> * X速度控制:F32输出接口,控制X方向传输带速度,为0~10,传输带运行速度设置;
> * Y气缸使能:F32输出接口,打开后Y轴运输带被抬起;
> * Y使能:DO接口,打开后Y方向传输带开始转动;
> * Y方向:DO接口,打开后传输带向Y反方向运动;
> * Y速度控制:F32输出接口,控制Y方向传输带速度,为0~10,传输带运行速度设置;
## 阻挡气缸
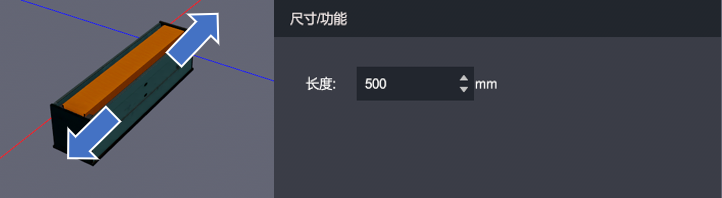
**参数尺寸:**
>长度为500mm(具体长度视传输带宽度而定)
**控制接口:**
> * 使能:DO接口,打开后阻挡板升起;
> * 阻挡反馈:DI接口,当物体与阻挡板接触时,模拟控制中阻挡反馈图标亮起;
## 滚动阻挡器
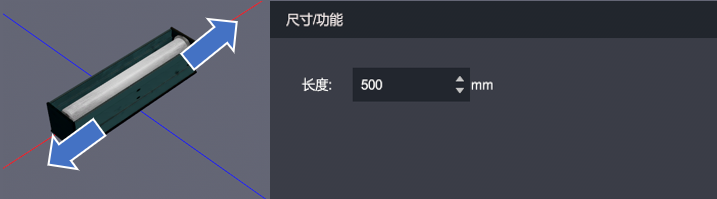
**参数尺寸:**
>长度为500mm(具体长度视传输带宽度而定)
**控制接口:**
> * 使能:DO接口,打开后滚动阻挡板升起;
## 斜坡滑台
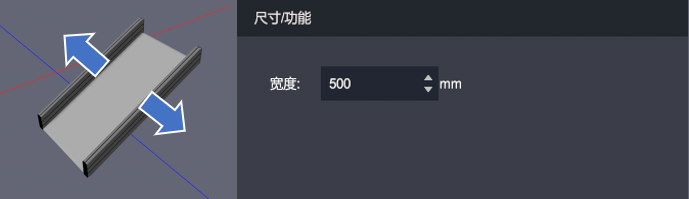
**参数尺寸:**
>宽度为500~1000mm
## 纸箱封装机
**参数尺寸:**
>宽度为500mm或1000mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,控制传输带速度;
> * 光电反馈:DI接口,当光电检测到物体时,反馈图标亮起;
> * 盒盖使能:DO接口,打开后进行盒盖封装;
## 1000升降传输

**参数尺寸:**
>宽度为500mm、1000mm、1500mm、2000mm
**控制接口:**
> * 电机:电机接口,打开后控制电机使传输带上下运动;
> * 高能反馈:F32输入接口,反馈上升距离;
> * 皮带使能:DO接口,打开后皮带运行;
> * 皮带方向:DO接口,打开后皮带方向反向;
> * 皮带速度:F32输出接口,为0~10,控制皮带速度;
> * 下限为反馈:DI接口,物料到达下限位时,反馈图标亮起;
> * 上限为反馈:DI接口,物料到达上限位时,反馈图标亮起;
> * 光电检测:DI接口,检测到物料时,反馈图标亮起;
## 传输挡板
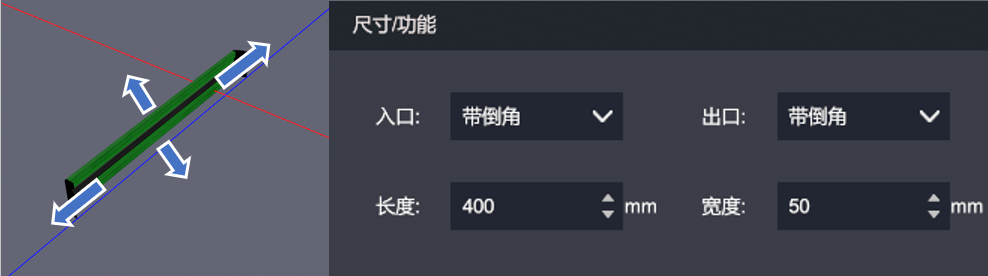
**参数尺寸:**
>入口、出口:带倒角或不带倒角
>长度为0~9999mm,宽度为50~100mm
## 装夹90块
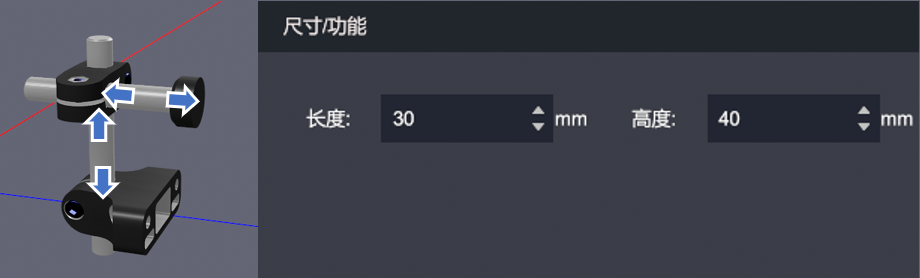
**参数尺寸:**
>长度为30~50mm,高度为20~50mm
## 微传输架

**参数尺寸:**
>宽度为30~50mm,高度为500~1000mm
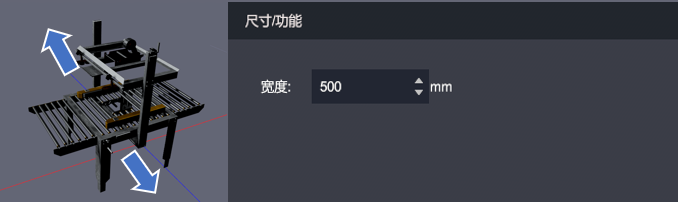
## H输送架

**参数尺寸:**
>宽度为500~100mm,高度为500~1000mm
##定位气缸S
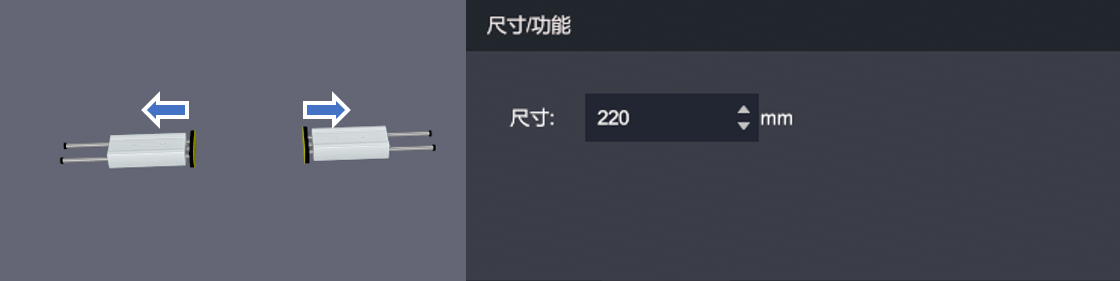
**参数尺寸:**
>尺寸为220~350mm,(此处尺寸为气缸定位间的距离)
**控制接口:**
> * 气缸使能:DO接口,打开后气缸使能夹紧物体;
> * 负霍尔反馈:DI接口,当气缸未夹住物体时,模拟控制的负霍尔反馈图标亮起;
> * 正霍尔反馈:DI接口,当气缸使能夹住物体时,模拟控制的正霍尔反馈图标亮起;
##定位气缸M
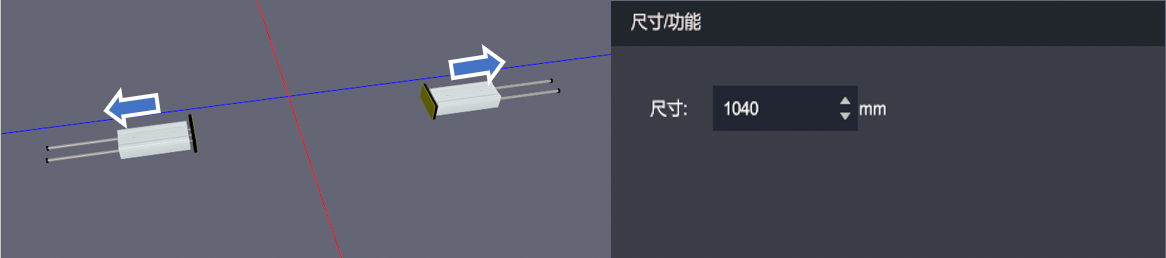
**参数尺寸:**
>尺寸为1000~9999mm,(此处尺寸为气缸定位间的距离)
**控制接口:**
> * 气缸使能:DO接口,打开后气缸使能夹紧物体;
> * 负霍尔反馈:DI接口,当气缸未夹住物体时,模拟控制的负霍尔反馈图标亮起;
> * 正霍尔反馈:DI接口,当气缸使能夹住物体时,模拟控制的正霍尔反馈图标亮起;
##PV90转向-100
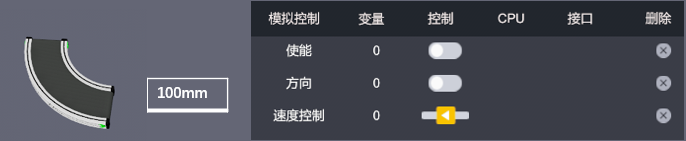
**参数尺寸:**
>宽度为固定数值100mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
##PV90转向-200
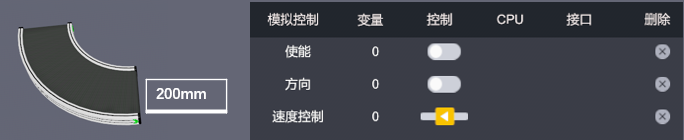
**参数尺寸:**
>宽度为固定数值200mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
##PV90转向-300

**参数尺寸:**
>宽度为固定数值300mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
##PV90转向-400
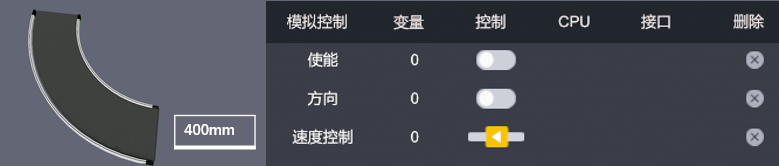
**参数尺寸:**
>宽度为固定数值400mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
##PV90转向-500
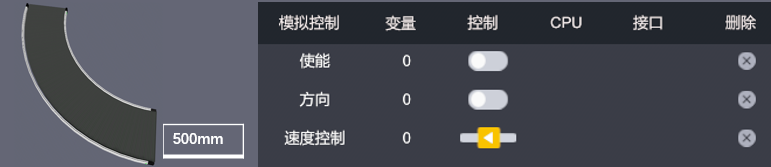
**参数尺寸:**
>宽度为固定数值500mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
##PV90转向-1000
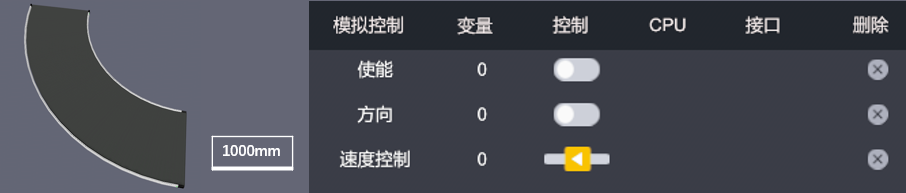
**参数尺寸:**
>宽度为固定数值1000mm
**控制接口:**
> * 使能:DO接口,打开后传输带开始转动;
> * 方向:DO接口,打开后传输带方向反向;
> * 速度:F32输出接口,为0~10,传输带运行速度设置;
