
[TOC]
## 1、接入信号说明
IOA支持虚拟的ZMC308BE以及真实的ZMC308BE接入,需要注意的是,IOA之中已经建立的1对1ZMC物理信号以及虚拟寄存器关系,需采用推荐的工程:[ZMC308运动控制器工程]
> **ZMC308运动控制器工程:**[链接](http://www.ioaol.com/down#Four)
***
建立的映射关系如下表所示:
| ZMC的端口/IO |IOA中的信号映射 |备注 |
| --- | --- |--- |
| DO00 ~ DO31 | DO00 ~ DO31 | |
| IN60 ~ IN91 | DI60 ~ DI91 | |
| modbus_ieee (10000) | M0 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10002) | M1 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10004) | M2 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10006) | M3 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10008) | M4 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10010) | M5 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10012) | M6 |虚拟ZMC支持电机仿真 |
| modbus_ieee (10014) | M7 |虚拟ZMC支持电机仿真 |
| modbus_ieee1024~1039 (1个float为2个16位寄存器)| float32输入0~7 |映射至寄存器 |
| modbus_ieee1040~1055 (1个float为2个16位寄存器 )| float32输出0~7 |映射至寄存器 |
***
## 2、软件模拟仿真
> **IOA连接正运动虚拟控制器教程:**[视频](//player.bilibili.com/player.html?bvid=BV1Gv4y1f7SN&page=1)
***
### IOA添加ZMC308控制器
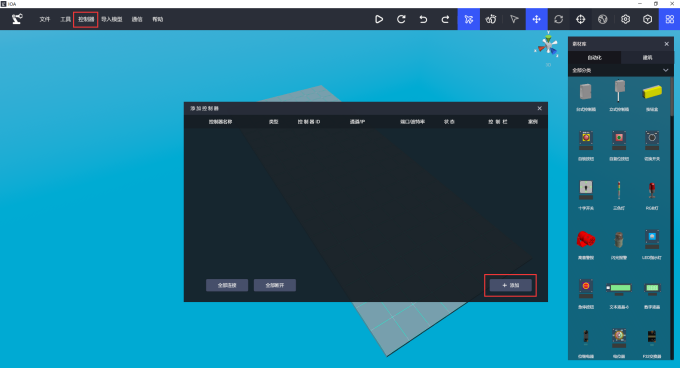
打开IOA虚拟工厂,点击菜单栏中的“控制器”,在弹出的“添加控制器”界面点击“+添加”按钮。
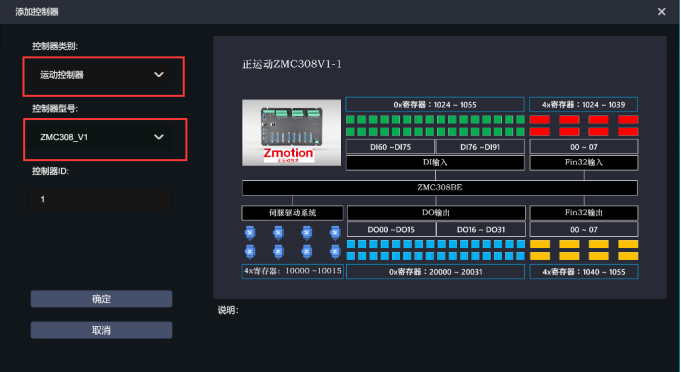
控制器类别选择“运动控制器”,控制器型号为“ZMC308_V1”,点击确定。
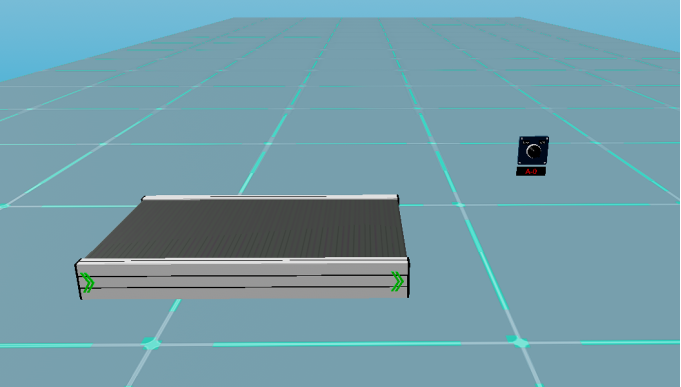
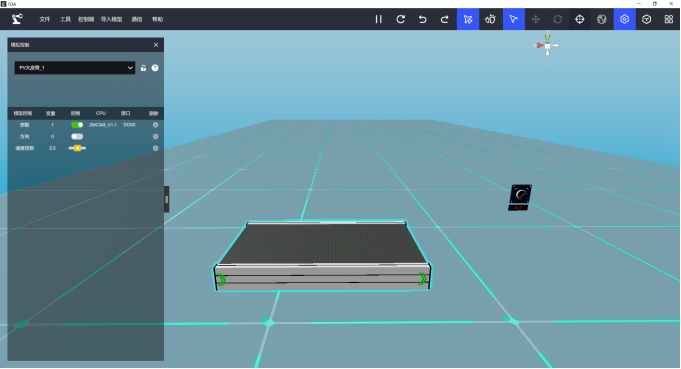
在IOA虚拟工厂场景中放置一条PV大皮带以及一个切换开关。
选中皮带线,点击菜单栏“显示控制”按钮,将显示PV大皮带的“模拟控制”界面,点击界面右侧的弹出按钮,将ZMC308_V1-1的输出点DO00拖拽到PV大皮带的使能开关处。
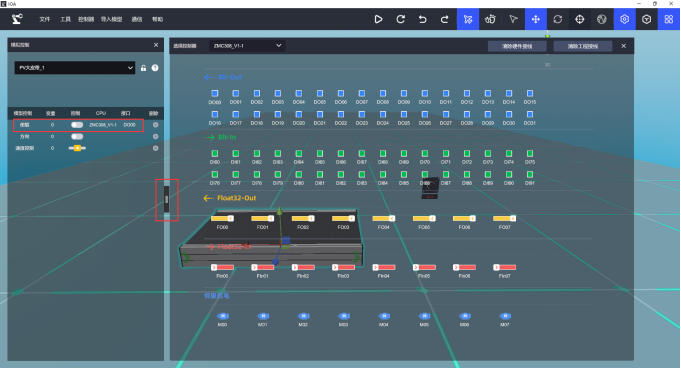
同样的将ZMC308_V1-1的输入点DI60拖拽到切换开关的控制开关处。
***
### 程序下载
打开zdevelop快捷方式,点击菜单栏“文件”中的“打开项目”;选择需要打开的项目文件(以.zpj结尾)。项目中的Basic文件中对轴的类型、速度等进行了设置,对ZMC308与IOA的位寄存器进行了对应。
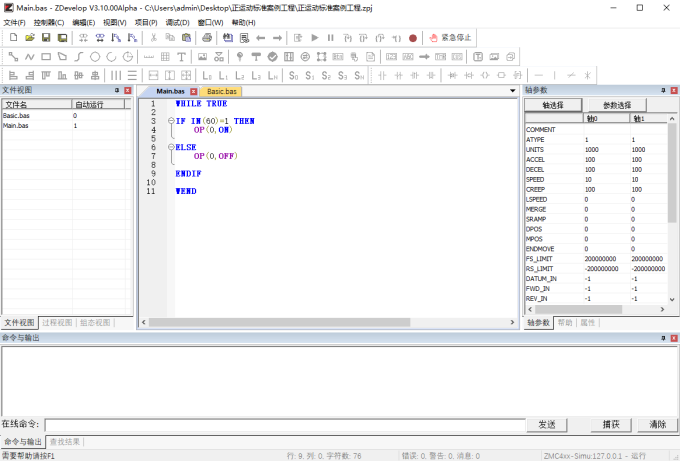
在文件Main中编写DI60控制DO00程序,如下图所示:
程序编写完成后,点击菜单栏“控制器”中的“连接到仿真器”。
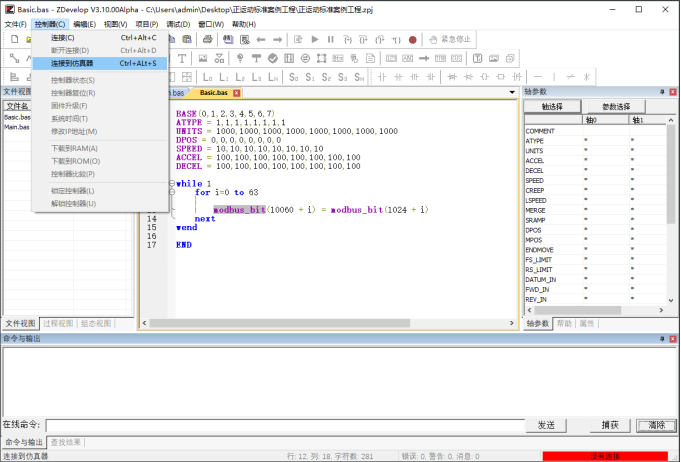
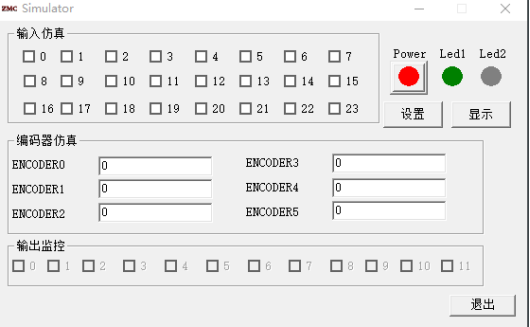
上述步骤执行完后系统会自动创建并弹出仿真器窗口,如下图所示。
点击ZDevelop菜单栏“下载到 ROM”图标将程序下载至仿真器。

下方窗口显示“Down to Controller Rom Success”表示程序下载成功,如下图所示。
***
### 程序运行
在IOA虚拟工厂中点击左上角菜单栏中的“控制器”,确认ZMC308_V1的IP地址为12.7.0.0.1,端口号为502,点击“连接”。

然后点击菜单栏“开始”按钮。打开切换开关,则皮带线运转,关闭切换开关,则皮带线停止。完成了ZMC308虚拟控制器对IOA场景的控制。
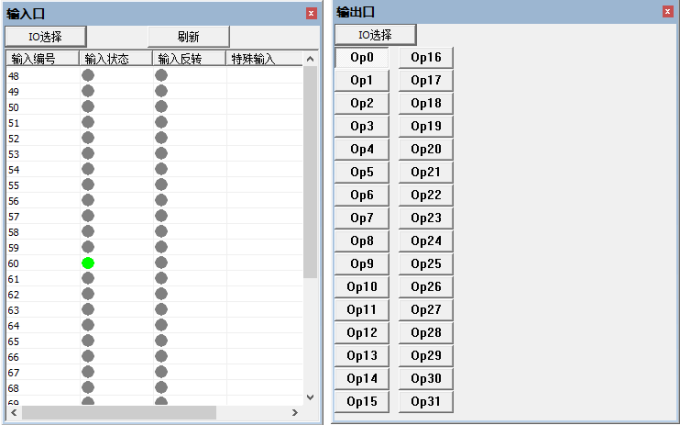
可在ZDevelop软件中查看输入输出信号,点击菜单栏“视图”中的“输入口”以及“输出口”。
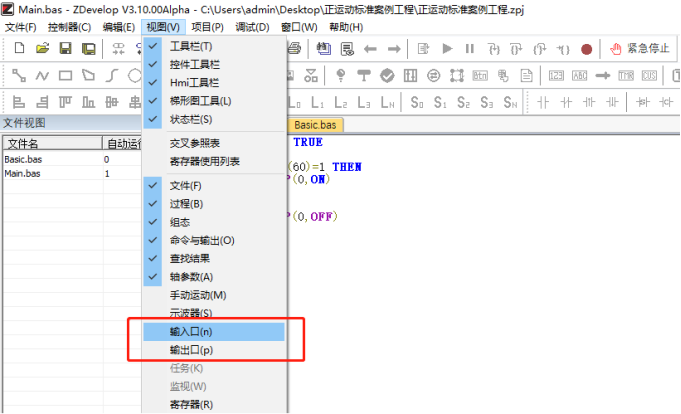
即可查看当前输入输出情况。
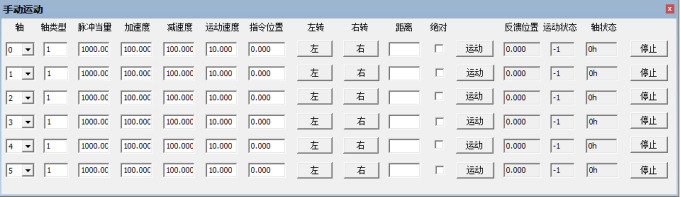
当IOA场景添加轴对象时,完成接线后,点击ZDevelop菜单栏“视图”中的“手动运动”,在弹出的“手动运动”界面可手动控制轴运动。
***
## 3、硬件模拟仿真
> **IOA连接正运动实体控制器教程:**[视频](//player.bilibili.com/player.html?bvid=BV1ZT4y1A7G5&page=1)
***
若使用硬件控制,同样的在IOA虚拟工厂中添加ZMC308_V1运动控制器。配置场景及接线。
### 程序下载
将ZMC308正运动控制箱电源接口使用品字型插头连接到220V电源上,并按下船型开关接通控制箱的电源:使用RJ45水晶头通讯电缆将控制箱与PC端网口进行连接(网络正常网口会出现绿灯闪烁);将正运动示教器电缆上的航插连接到控制箱的示教器接口上。

点击菜单栏“文件”中的“打开项目”,将ZMC308运动控制器工程打开,并在Main文件中编写控制程序。程序编写完成后,点击菜单栏“控制器”中的“连接”按钮。
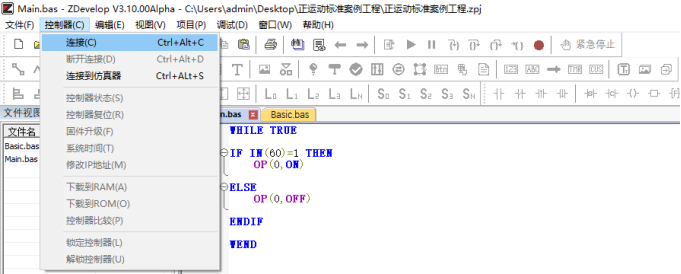
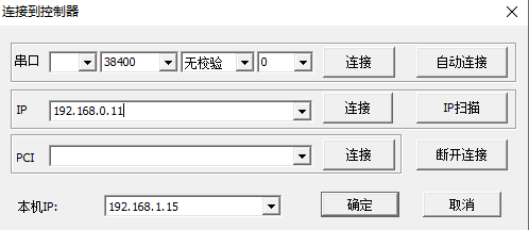
弹出“连接到控制器”窗口中,将IP改为控制器IP地址(出厂IP:192.168.0.11,需要确认电脑IP和控制器IP在同一网段),并点击连接。若不知道控制器IP,可以采用 IP 扫描来查看。
控制器连接完成后,点击菜单栏按钮“下载到 RAM”,下方窗口显示“Down to Controller Rom Success”表示程序下载成功。
下载成功命令和输出。

***
IOA虚拟工厂控制器的通道IP为实体控制器的192.168.0.11,连接完成之后,即可通过实体控制器编程控制虚拟工厂中模型运动。
- IOA简介
- 软件安装及注册
- 软件安装要求
- 西门子PLC仿真与安装
- 博图软件及仿真软件安装
- 实体1200PLC接入IOA
- 虚拟1200PLC接入IOA
- 虚拟1500PLC接入IOA
- S7-1214接入IOA信号说明
- S7-1512接入IOA信号说明
- ZMC运动控制系列仿真与安装
- ZMC308BE控制器说明
- ZMC308BE接入IOA仿真
- KEBA工业机器人软件安装使用及仿真
- 软件安装及维护
- IOA仿真与虚拟示教器
- IOA仿真与真实示教器
- 单片机控制与仿真
- arduino-uno控制器
- uno接入说明
- uno函数库
- arduino-mega控制器
- mega接入说明
- mega函数库
- ESP32物联网单片机
- ESP32接入说明
- ESP32库函数
- Python虚拟示教器控制器
- 虚拟机器人示教器
- 基础模块
- Mbus-S虚拟工厂模块
- Mbus-R4模块
- 物联网模块
- Python 环境搭建
- 视觉相机应用
- 图像识别助手说明
- 视觉相机接入IOA方法
- 软件注册
- 软件下载
- 软件安装
- 快速入门
- 快速上手视频合集
- 软件界面及基本操作
- IOA界面应用基础操作
- UI界面说明
- 快捷键应用
- 3D导航模式
- 3D场景布局操作
- 控制器连接
- 11
- IOA模型库概览
- 物流传输模型库说明
- 机械零件模型说明
- 机电单元模型说明
- 传感交互模型说明
- 人机交互模型
- 传感器模型
- 虚拟继电模型
- 机器人模型
- 物料模型库
- 移动机器人
- 建筑模型库
- 5分钟入门课程包
- 西门子PLC实训课程资源包
- 工业机器人示教与编程
- ZMC运动控制与编程
- 嵌入式入门与仿真
- 系统集成与应用